





Artykuł z serii: Kurs regulacji PID - Wirtualne Laboratorium
Rozdz. 28.1 Wstęp
Poznałeś już najprostszy regulator typu P składający się tylko z elementu porównującego i wzmacniacza Kp. Zapewniał z grubsza dochodzenie do wartości zadanej x(t) oraz tłumienie zakłóceń z(t). Potem pojawił się regulator PD który robił to samo, tylko dużo szybciej i z mniejszymi oscylacjami. W dalszym ciągu jednak wzmocnienie układu zamkniętego w stanie ustalonym Kz i wzmocnienie uchybowe Ku było takie:

Rys. 28-1
Ze wzorów wynika, że Kz jest zawsze trochę mniejsze od 1 . Tym bliższe 1 im większe K. Analogicznie Ke jest zawsze trochę większe od 0. Tym bliższe 0 im większe K. Przypominam, że K to jest wzmocnienie ustalone całego otwartego toru regulacji. Czyli uwzględniające Kp regulatora i Ko obiektu.
Tak się składa że jest przeważnie Ko=1, wtedy K=Kp. Jest to wygodne przy dobieraniu nastaw regulatora–> rozdz. 31.
A teraz najważniejsze!
Dla regulacji typu I wzory na Kz i Ke są następujące:

Polecam podobny kurs z animacją, ale bez Scilaba! –> https://pidlaboratory.com/
Tam też znajdziesz inne ciekawe kursy dla automatyków
Rys. 28-2
Taniej, pardon prościej już się nie da! A co to oznacza? Jeżeli na wejście damy x(t) w postaci skoku jednostkowego, to po pewnym czasie będzie y(t)=x(t). Czyli uchyb e(t)=0! Taki jest główny cel każdego automatyka.
Czas regulacji może być duży, mogą pojawić się też gasnące oscylacje . Ale gdy spełnione są pewne warunki dodatkowe (Hurwitz!.. Hurwittz!..) to zawsze tak się stanie. A gdy nie są spełnione? Wtedy układ jest niestabilny i oczywiście wzory z Rys. 28-2 nie obowiązują.
Uwaga
Wzory z Rys. 28-2 są właściwie szczególnym przypadkiem Rys. 28-1. Bo jakie jest wzmocnienie K obiektu z członem całkującym w stanie ustalonym. Czyli po czasie nieskończenie długim? K=nieskończoność! Podstaw tę wartość do Rys. 28-1 a otrzymasz Rys. 28-2.
Regulator I składa się z elementu porównującego i członu całkującego o regulowanym czasie całkowania Ti. Rzadko stosowane jest jako samodzielne urządzenie. Człon całkujący I występuje za to w regulatorach PI lub PID i jego celem jest sprowadzenie uchybu e(t) do zera.
Poznałeś go już wcześniej w rozdziale 8, tym nie mniej proponuję szybką powtórkę!
Rozdz. 28.2 Człon całkujący
Rozdz. 28.2.1 Wstęp
Zbadamy 3 człony o różnej prędkości całkowania
–„Wolny”
–„Taki sobie”
–„Szybki”
Nie są to jeszcze regulatory I, bo nie mają elementu porównującego obliczającego uchyb e(t)=x(t)-y(t)
Rozdz. 28.2.2 Człon I „Wolny” Ti=2 sek
Wywołaj PID/14_regulacja_typu_I/01_calkujacy_wolny.zcos

Rys. 28-3
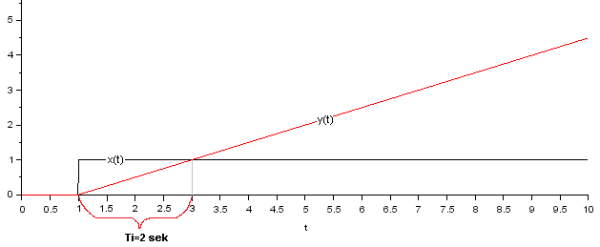
Widzisz typowy człon całkujący o czasie całkowania Ti=2 sek. Za chwilę będziesz wiedział dlaczego akurat 2 sek.
Wciśnij „start”
Rys. 28-4
Sygnał narasta ze stałą prędkością. Ti=2 sek to czas po którym y(t) zrówna się z wartością skoku x(t). Następne człony będą „szybsze”. Dlatego ten ma nazwę „wolny”.
Rozdz. 28.2.3 Człon I „Taki sobie” Ti=1 sek
Wywołaj PID/14_regulacja_typu_I/02_calkujacy_taki_sobie.zcos

Rys. 28-5
Ti=1 sek
Wciśnij „start”

Rys. 28-6
Po czasie Ti=1 sek y(t) zrównało się z wartością skoku x(t). Czyli 2 razy szybciej niż poprzednio.
Rozdz. 28.2.4 Człon I „Szybki” Ti=0.5 sek
Wywołaj PID/14_regulacja_typu_I/03_calkujacy_szybki.zcos

Rys. 28-7
Ti=0.5 sek.
Wciśnij „start”

Rys. 28-8
Po czasie Ti=0.5 sek y(t) zrównało się z wartością skoku x(t). Znowu 2 razy szybciej niż poprzednio.
Rozdz. 28.3 Serwomechanizm sprowadzający uchyb e(t) do 0, jako przykład regulacji typu I
Rozdz. 28.3.1 Wstęp
Jest to dobry przykład na to, że regulacja typu I sprowadza uchyb do 0
Rys. 28-9
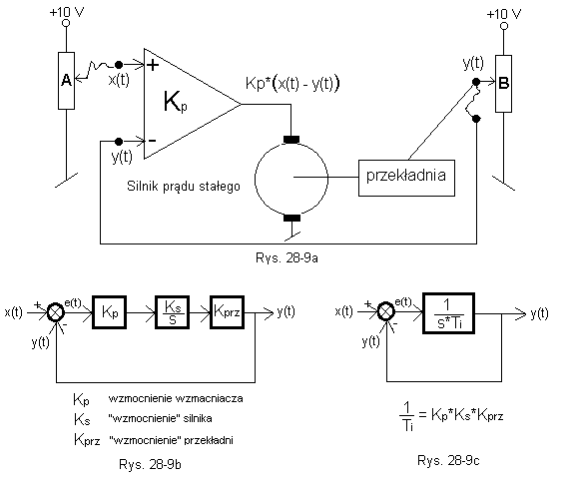
Wielkością wejściową x(t) jest Twoja ręka na potencjometrze A Rys. 28-9a. Silnik prądu stałego sterowany jest przez różnicę napięć e(t)=x(t)-y(t). Wał silnika jest sprzężony mechanicznie przez przekładnię z suwakiem potencjometru B. Silnik jest idealny, tzn. że gdy jest na nim napięcie nawet tak małe jak +1 µV, to suwak będzie się powolutku przesuwał do góry, czyli napięcie y(t) będzie powoli rosło. A gdy +2 µV to +2 razy szybciej. Analogicznie -1 µV to suwak będzie opadał. Jest to więc klasyczny człon całkujący , czyli człon I.
Suwak B stanie w miejscu tylko w jednej sytuacji. Gdy x(t)=y(t), czyli gdy napięcie na silniku będzie zerowe.
Na początku obydwa suwaki są na dole. Czyli x(t)=y(t)=0V i napięcie na silniku też jest zerowe, bo Kp*[x(t)-y(t)]= Kp*(0-0)V=0V i silnik stoi. Nagle ustawisz na potencjometrze A +5V. Tak jakbyś podał skok jednostkowy x(t)=+5V Wtedy silnik ruszy do góry z dużą prędkością początkową. Za chwilę prędkość się zmniejszy, bo na wejściu – wzmacniacza pojawi się napięcie „odejmujące” od suwaka. B
W ten sposób suwak B dojdzie do +5V po czasie teoretycznie nieskończenie długim. Napięcie na silniku będzie zerowe.
A co by było gdyby silnik z przekładnia miał bezwładność i suwak przekroczył by +5V. Np byłoby +5.1V. Wtedy pojawi się napięcie ujemne i suwak B cofnie się w kierunku +5V, aż po pewnym czasie znowu stanie na +5V.
Tak jest w świecie idealnym. W realu występują jakieś histerezy, strefy nieczułości i inne barachła, tak że suwak ustawiłby się np. na +4.999V. Wtedy bardzo małe napięcie na silniku nie byłoby w stanie go ruszyć.
Widzisz więc, że przy idealnych założeniach uchyb będzie zerowy, co jest typowe dla sterowania typu I.
Rys. 28-9b jest wersją blokową schematu z Rys. 28-9a. Tu Kp wzmacniacza jest oczywiste. Ks silnika jest tym większe im większą prędkość ma silnik przy danym napięciu. Parametr Kprz przekładni to jak przerzutka w rowerze.
W sumie jest to człon całkujący o jakimś czasie całkowania Ti objęty pętlą ujemnego sprzężenia zwrotnego–>Rys. 28-9c.
Rozdz. 28.3.2 Model serwomechanizmu wolnego
Serwomechanizm sprowadza się do bardzo prostego schematu z Rys. 28-9c. Jego model w X-cosie wygląda tak.
Wywołaj PID/14_regulacja_typu_I/04_model_serwo_wolny.zcos

Rys. 28-10
Model serwomechanizmu gdy Ti=4 sek (sprawdziłeś to np. doświadczalnie w układzie otwartym)
Wciśnij „start”

Rys. 28-11
W 3 sekundzie ustawiłeś potencjometr A na 7.5 V. Czyli skok x(t)=7.5 V.
Serwomechanizm doszedł do stanu ustalonego y(t)=7.5 V po ok. 30 sekundach. Całkowanie I zapewniło uchyb ustalony e(t)=0!
Obiekt otwarty był członem całkującym o Ti=4 sek. Odpowiedź układu zamkniętego wygląda jak typowy człon inercyjny o Tz=4 sek. Tak też wynika załączonego wzoru na transmitancję układu zamkniętego. Trochę leniwy ten serwomechanizm.
Przyspieszmy go dając Ti=1 sek. Co to oznacza? Albo większe Kp, albo szybszy silnik czyli większe Ks, albo „szybsza” przekładnia Kprz-patrz na Rys. 28-9b.
Rozdz. 28.3.3 Model serwomechanizmu szybkiego
Wywołaj PID/14_regulacja_typu_I/05_model_serwo_szybki.zcos

Rys. 28-12
Model serwomechanizmu gdy Ti=1 sek
Wciśnij „start”

Rys. 28-13
Układ zareagował 4 razy szybciej. Do stanu ustalonego y(t)=7.5 V doszedł już po ok 7.5 sekundach.
Rozdz. 28.3.4 Wnioski z badania serwomechanizmu
W układzie regulacji pojawiło się całkowanie I, bo silnik prądu stałego jest członem całkującym. Spowodowało to doprowadzenie uchybu e(t) do zera. Jest to najważniejsza zaleta całkowania. W poprzednich rozdziałach składowa proporcjonalna P nie była w stanie sprowadzić uchybu do 0. Tu składowa I zrobiła to. Bo choćby nie wiem jak mały jest uchyb, to nawet bardzo małe napięcie zawsze będzie kręciło silnikiem tak by y(t)=x(t). Oczywiście teoretycznie. W praktyce strefa nieczułości i histereza silnika spowoduje jednak jakiś uchyb.
Rozdz. 28.4 Regulacja I z obiektem inercyjnym
Rozdz. 28.4.1 Wstęp
Zbadamy układ, w którym regulator I steruje obiektem inercyjnym o stałej czasowej T=10 sek. Zaczniemy od najostrożniejszej nastawy Ti=36 sek, potem Ti=16 sek i skończymy na Ti=8 sek. Będzie wymagana cierpliwość, bo czas doświadczenia to 2 minuty. Zaczniemy jak zwykle od badania samego obiektu inercyjnego.

Rys. 28-14
Obiekt inercyjny o stałej czasowej T=10 sek
Wciśnij „start”

Rys. 28-15
Chyba wszystko jasne.
Rozdz. 28.4.2 Regulacja I gdy Ti=36 sek
Wywołaj PID/17_regulacja_typu_I/07_1T_I36

Rys. 28-16
Jedyną nastawą regulatora jest Ti=36 sek. Zaczynamy od tak wolnego całkowania, bo obawiamy się oscylacji a nawet niestabilności.
Wciśnij „start”

Rys. 28-17
Chyba obawy były na wyrost. Układ bardzo wolno doszedł bez oscylacji ( inaczej – aperiodycznie) do stanu równowagi, gdzie x(t)=y(t). Czyli uchyb e(t)=0. Tak na prawdę to po 120 sek nie ma jeszcze stanu y(t)=1. Nastąpi to później. Ale chyba wierzysz, że tak będzie. Dopóki uchyb e(t) będzie różny od 0 (tu akurat większy od 0), dopóty regulator I będzie pchał sygnał do stanu w którym y(t)=x(t)=1. W teorii to nieskończenie długo, w praktyce po ok. 130 sek.
Rozdz. 28.4.3 Regulacja I gdy Ti=16 sek
Poprzedni przebieg był wołowaty. Szybsze całkowanie Ti=16 powinno poprawić sytuację.
Wywołaj PID/14_regulacja_typu_I/08_1T_I16_opt.zcos

Rys. 28-18
Regulacja typu I Ti=16 sek
Wciśnij „start”

Rys. 28-19
Na początek radość wielka. Ponieważ s(t) szybciej rośnie to y(t) też robi to samo. Niestety pojawiły się oscylacje. Mimo wszystko po ok. 120 sek sygnał wyjściowy y(t) doszedł do stanu równowagi, w którym jak to regulację typu I przystało, uchyb ustalony jest zerowy. Czy odpowiedź jest znacznie lepsza od poprzedniej? Załóżmy, że tak pomimo oscylacji.
Rozdz. 28.4.4 Regulacja I gdy Ti=8 sek
Jeszcze bardziej skróćmy czas regulacji dając Ti=8. Może będzie lepiej?
Wywołaj PID/14_regulacja_typu_I/09_1T_I8.zcos

Rys. 28-20
Regulacja typu I Ti=8 sek
Wciśnij „start”
Rys. 28-21
Trochę krótszy czas regulacji lecz większe oscylacje. Przyjmiemy więc, że nastawa Ti=16 sek jest optymalną dla członu inercyjnego o stałej czasowej T=10 sek.
Rozdz. 28.5 Regulacja I z obiektem dwuinercyjnym
Rozdz. 28.5.1 Wstęp
Regulator I steruje obiektem dwuinercyjnym. Zaczniemy od badania samego obiektu. Już obiekt inercyjny okazał się trudny do sterowania, długi czas regulacji i oscylacje. Tu będzie będzie chyba jeszcze gorzej.
Wywołaj PID/14_regulacja_typu_I/10_2T_otwarty.zcos

Rys. 28-22
Obiekt dwuinercyjny o stałych czasowych T1=3 sek i T2=5 sek
Wciśnij „start”

Rys. 28-23
Widać punkt przegięcia charakterystyczny dla obiektów wieloinercyjnych. Z wykresu trudno odczytać parametry T1=3sek i T2=5sek. Są na to sposoby, ale dajmy sobie spokój.
Rozdz. 28.5.2 Regulacja I gdy Ti=25 sek
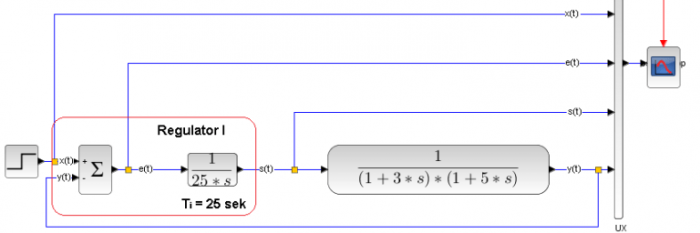
Wywołaj PID/14_regulacja_typu_I/11_2T_I25.zcos
Rys. 28-24
Regulacja typu I Ti=25 sek
Wciśnij „start”

Rys. 28-25
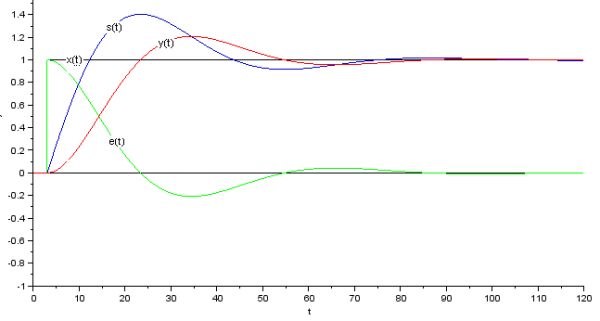
Zaskoczenie. Przebieg wyraźnie lepszy od „łatwiejszej” regulacji I dla członu inercyjnego z Rys. 28-17!
Byłem przygotowany na gorszą odpowiedź y(t). A może ktoś to wyjaśni?
Rozdz. 28.5.3 Regulacja I gdy Ti=15 sek
Wywołaj PID/14_regulacja_typu_I/12_2T_I15_opt.zcos

Rys. 28-26
Regulacja typu I Ti=15 sek
Wciśnij „start”

Rys. 28-27
Jeżeli nie zależy nam na oscylacjach, to jest lepiej. Krótszy czas regulacji.
Rozdz. 28.5.4 Regulacja I gdy Ti=6 sek
A niech tam. Dajmy bardzo szybkie całkowanie Ti=6 sek
Wywołaj PID/14_regulacja_typu_I/13_2T_I6.zcos

Rys. 28-28
Regulacja typu I Ti=6 sek
Wciśnij „start”

Rys. 28-29
Jednak przesadziliśmy. Nie dość, że długi czas regulacji, to dyndanie jest nie do przyjęcia.
Przyjmiemy więc, że nastawa Ti=15 sek jest optymalną dla członu dwuinercyjnego o stałych czasowych T1=3 sek i T2 = 5 sek.
Rozdz. 28.6 Regulacja I z obiektem trójinercyjnym
28.6.1 Wstęp
Najpierw sam obiekt.
Wywołaj PID/14_regulacja_typu_I/14_3T_otwarty.zcos

Rys. 28-30
Obiekt trójinercyjny o stałych czasowych T1=0.5 sek, T2=3 sek i T3=5 sek
Wciśnij „start”

Rys. 28-31
Odpowiedź podobna dla dwuinercyjnego z Rys. 28-23, chociaż dobrze wiemy, że trójnercyjny jest trudniejszy do sterowania.
Rozdz. 28.6.2 Regulacja I gdy Ti=30 sek
Zaczniemy od ostrożnego sterowania, czyli wolnego całkowania Ti=30 sek.
Wywołaj PID/14_regulacja_typu_I/15_3T_I30.zcos
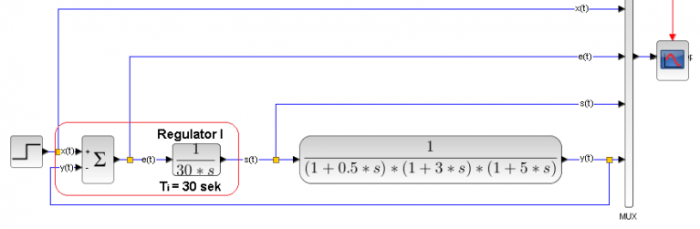
Rys. 28-32
Regulacja typu I Ti=30 sek
Wciśnij „start”

Rys. 28-33
Widać to ostrożne sterowanie. Sygnał sterujący s(t) jest niewiele większy od y(t).
Tak jak mało wymagający od ucznia nauczyciel. Dlatego odpowiedź jest wolna i bez oscylacji.
Rozdz. 28.6.3 Regulacja I gdy Ti=10 sek
Wywołaj PID/14_regulacja_typu_I/16_3T_I10_opt.zcos

Rys. 28-34
Regulacja typu I Ti=10 sek
Wciśnij „start”

Rys. 28-35
Czas regulacji krótszy chociaż pojawiły sie oscylacje.
Rozdz. 28.6.4 Regulacja I gdy Ti=5 sek
Wywołaj PID/14_regulacja_typu_I/17_3T_I5.zcos

Rys. 28-36
Regulacja typu I Ti=5 sek
Wciśnij „start”<

Rys. 28-37
Straszne oscylacje. Przyjmiemy więc, że nastawa Ti=10 sek jest optymalną dla tego członu trójinercyjnego
Rozdz. 28.6.5 Gdy przesadzimy z całkowaniem
Np. Ti = 1.5 sek
Wywołaj PID/14_regulacja_typu_I/18_3T_I1.5_niestabilny.zcos

Rys. 28-38
Regulacja typu I Ti=1.5 sek
Tego nie widać, ale jest inna skala oscyloskopu. Domyślasz się dlaczego?
Wciśnij „start”

Rys. 28-39
Piękna niestabilność. Amplituda drgań rośnie do +/ nieskończoności.-
Rozdz. 28.7 Regulacja I z zakłóceniami.
28.7.1 Wstęp.
Sterowane będą te same 3 obiekty. Na ich wejścia będą działały duże zakłócenia z(t)=+0.5 lub z(t)=-0.5. Spowodowany przez nie uchyb e(t) tak będzie „denerwował” składową całkującą I, że ta zawsze sprowadzi go do 0. Trzeba się tylko uzbroić się w cierpliwość, ponieważ z powodu wolnych przebiegów typowych dla regulacji typu I, eksperymenty będą trwały do 4 minut.
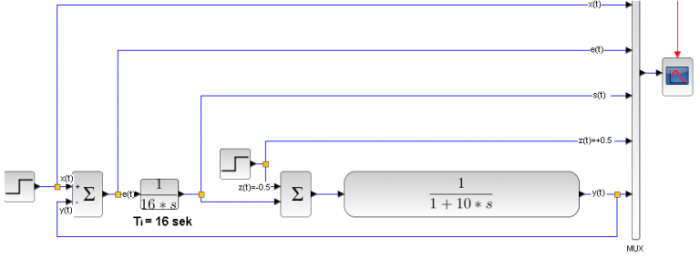
Rozdz. 28.7.2 Inercyjny zakłócenie dodatnie z(t)=+0.5, Ti = 16 sek.
Wywołaj PID/14_regulacja_typu_I/19_1T_I16_opt_zakl+.zcos

Rys. 28-40
Zakłócenie z(t)=+0.5 pojawi się w 130 sekundzie.
Wciśnij „start”

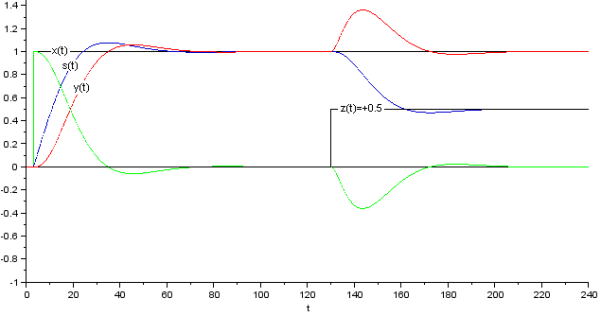
Rys. 28-41
Do 130 sekundy, czyli do pojawienia się zakłócenia, przebieg jest taki sam jak na Rys. 28-19, biorąc oczywiście pod uwagę inną skalę czasu na oscyloskopach. Początkowo zakłócenie z(t)=+0.5 spowodowało wzrost sygnału y(t) ale potem składowa I „zmusiła” y(t) do powrotu do poprzedniej wartości, czyli do y(t)=1. Odpowiada to odpowiedniemu sprowadzeniu uchybu e(t) do 0. Na dodatnie zakłócenie -„grzanie”, sterowanie s(t) zareagowało zmniejszeniem mocy.
Rozdz. 28.7.3 Inercyjny zakłócenie ujemne z(t)=-0.5, Ti = 16 sek .
Wywołaj PID/14_regulacja_typu_I/20_1T_I16_opt_zakl-.zcos
Rys. 28-42
Zakłócenie z(t)=-0.5 pojawi się w 130 sekundzie.
Wciśnij „start”

Rys. 28-43
Na ujemne zakłócenie -„chłodzenie”, sterowanie s(t) zareagowało zwiększeniem mocy. Uchyb e(t) został sprowadzony do 0.
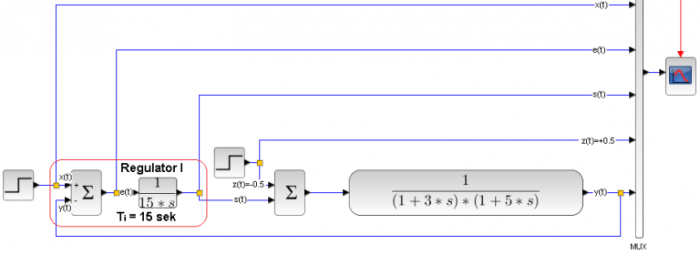
Rozdz. 28.7.4 Dwuinercyjny zakłócenie dodatnie z(t)=+0.5, Ti =15 sek .
Wywołaj PID/14_regulacja_typu_I/21_2T_I15_opt_zakl+.zcos

Rys. 28-44
Zakłócenie z(t)=+0.5 pojawi się w 130 sekundzie.
Wciśnij „start”
Rys. 28-45
Na dodatnie zakłócenie z(t) -„grzanie”, sterowanie s(t) zareagowało zmniejszeniem mocy.
Rozdz. 28.7.5 Dwuinercyjny zakłócenie ujemne z(t)=-0.5, Ti =15 sek .
Wywołaj PID/14_regulacja_typu_I/22_2T_I15_opt_zakl-.zcos
Rys. 28-46
Zakłócenie z(t)=-0.5 pojawi się w 130 sekundzie.
Wciśnij „start”
Rys. 28-47
Na ujemne zakłócenie -„chłodzenie”, sterowanie s(t) zareagowało zwiększeniem mocy.
Rozdz. 28.7.6 Trójinercyjny zakłócenie dodatnie z(t)=+0.5, Ti =10 sek .
Wywołaj PID/14_regulacja_typu_I/23_3T_I10_opt_zakl+.zcos

Rys. 28-48
Zakłócenie z(t)=+0.5 pojawi się w 130 sekundzie.
Wciśnij „start”

Rys. 28-49
Na dodatnie zakłócenie dodatnie z(t) -„grzanie”, sterowanie s(t) zareagowało zmniejszeniem mocy.
Rozdz. 28.7.7 Trójinercyjny zakłócenie ujemne z(t)=-0.5, Ti =10 sek .
Wywołaj PID/14_regulacja_typu_I//24_3T_I10_opt_zakl-.zcos

Rys. 28-50
Zakłócenie z(t)=-0.5 pojawi się w 130 sekundzie.
Wciśnij „start”

Rys. 28-51
Na ujemne zakłócenie z(t) -„chłodzenie”, sterowanie s(t) zareagowało zwiększeniem mocy.
Rozdz. 28.8 Porównanie regulacji typu I, P i PD .
Rozdz. 28.8.1 Wstęp .
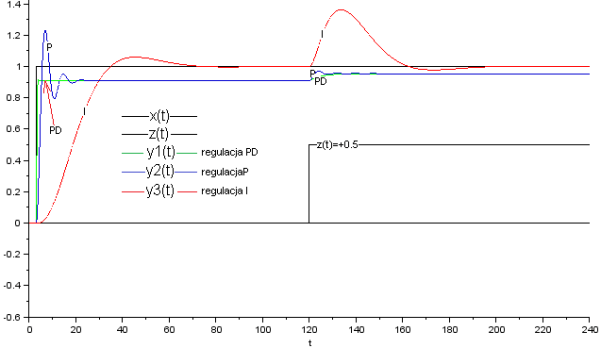
Regulatory typu PD, P oraz I będą sterować obiektem dwuinercyjnym . Na ich wejścia będą podane w 3 sekundzie skoki jednostkowe x(t) a w 120 sekundzie zakłócenie dodatnie z(t)= +0.5 lub ujemne z(t)=-0.5.
Porównamy sygnały wyjściowe y1(t), y2(t) i y3(t), a zwłaszcza ich stany ustalone oraz czasy regulacji. Będziemy obserwować tylko skok jednostkowy x(t), zakłócenie z(t) i 3 sygnały wyjściowe y1(t), y2(t) i y3(t). Pominięte sygnały e(t) i s(t) były już obserwowane we wcześniejszych doświadczeniach.
Rozdz. 28.8.2 Zakłócenie dodatnie z(t)=+0.5.
Wywołaj PID/14_regulacja_typu_I/25_2T_Porown_P_PD_I_zakl+.zcos

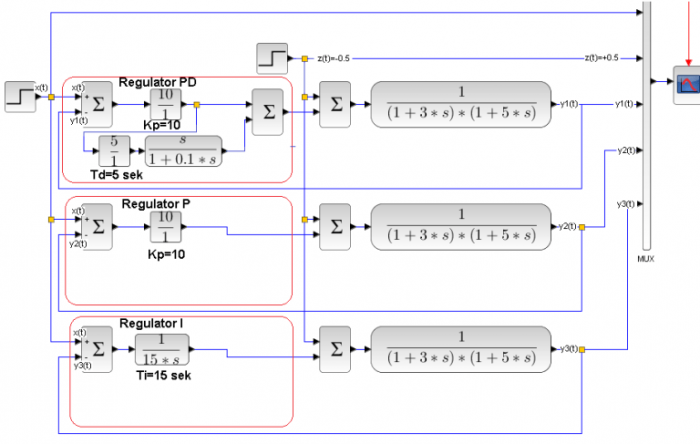
Rys. 28-52
Nastawy regulatora Kp=10 regulatorów PD i P zgodnie ze wzorem na Ke z Rys. 28-1 zapewnią uchyb ustalony e(t)=9%. Dodatkowo nastawa Td=5 sek regulatora PD da nam możliwie krótki czas regulacji z niewielkim przeregulowaniem.
Regulator I zapewnia zerowy uchyb ustalony e(t) niezależnie od nastawy Ti. Oczywiście pod warunkiem, że układ będzie stabilny. W naszym przypadku Ti=15 sek zapewni w miarę krótki czas regulacji z niewielką oscylacją. Do tych optymalnych nastaw doszliśmy wczesniej.
Wciśnij „start”
Rys. 28-53
Regulacja typu PD-zielona. jest najszybsza, chociaż daje niezerowy uchyb ustalony.
Regulacja typu P-niebieska. jest wolniejsza oraz z przeregulowaniami i też daje taki sam niezerowy uchyb ustalony.
Regulacja typu I-czerwona. jest najwolniejsza, za to zapewnia zerowy uchyb ustalony. I to jest właśnie podstawową zaletą regulacji typu I, czyli całkującej.
Rozdz. 28.8.3 Zakłócenie ujemne z(t)=-0.5.
Wywołaj PID/14_regulacja_typu_I/26_2T_Porown_P_PD_I_zakl-.zcos
Rys. 28-54
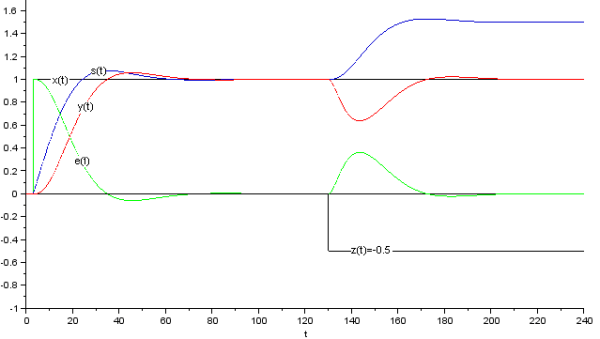
To samo co poprzednio tylko zakłócenie z(t)=-0.5
Wciśnij „start”

Rys. 28-55
Analizę pozostawiam Czytelnikowi.
Rozdz. 28.8. Wnioski.
Dlaczego regulacja typu I jest tak wolna? Popatrz na sygnały sterujące s(t) we wcześniejszych eksperymentach. Dla P a tym bardziej dla PD są one duże na początku x(t) i z(t). To właśnie decyduje o szybkim czasie regulacji. W dodatku w przypadku PD składowa różniczkująca daje efekt hamowania zapobiegający oscylacjom. Tego początkowego kopa s(t) nie ma regulacja I.
Co by tu zrobić, żeby układ w miarę szybko doszedł do stanu ustalonego, ale z zerowym uchybem ustalonym? Metoda narzuca sie sama.
Kombinacja regulatora P z regulatorem I dająca regulator PI–>rozdz. 29.
Albo jeszcze lepiej – kombinacja PD z regulatorem I dająca regulator PID–>rozdz. 30.
