





Artykuł z serii: Kurs regulacji PID - Wirtualne Laboratorium
Rozdz. 8.1 Wstęp

Rys. 8-1
Transmitancja członu całkującego
Dobrze jest, gdy licznik transmitancji ma wartość 1. Wtedy parametr- czas całkowania Ti ma łatwą interpretację–>p.8.4.
Uwaga dla nieznających całek i pochodnych.
Na razie się nie przejmuj. Wystarczy, że będziesz kojarzył przebieg sygnału wyjściowego y(t) z sygnałem wejściowym x(t) (najczęściej skok jednostkowy) i czasem całkowania Ti. Całkowaniu i różniczkowaniu będą poświęcone rozdziały 15 i 16.
Rozdz. 8.2 Schemat z suwakiem i bargrafem
Jak zwykle opis nowego członu dynamicznego zaczynamy od suwaka i bargrafu. Reakcja na wymuszenie suwaka jest bardziej obrazowa niż matematyka.
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/01_całkujący_suwak_bargraf.zcos

Rys. 8-2
Wciśnij „start”.

Rys. 8-3
Po starcie poustawiaj okna suwaka i bargrafu na tle schematu tak, żeby były widoczne mierniki cyfrowe.
Na początku suwak automatycznie ustawiony jest na 0. Na wyjściu też jest 0, co specjalnie nie dziwi.
Ustawmy sygnał na +0.025. Zauważ, że jest to mała wartość w porównaniu do poprzednich doświadczeń. Sygnał na wyjściu zacznie narastać ze stałą prędkością.
Zwiększ 2-krotnie sygnał wejściowy , czyli na +0.05. Sygnał dalej będzie narastał ale z 2-krotnie większą prędkością.
Ustaw teraz 0 na wejściu korzystając z pomocy miernika cyfrowego. Sygnał się zatrzyma.
Zauważ, że na wejściu jest 0 a na wyjściu wartość niezerowa! Jest to typowe dla członu całkującego.
Ustaw suwak na -0.025–>sygnał zacznie maleć. Gdy suwak =-0.05 to maleje 2 razy szybciej.
Pobaw się jeszcze trochę. Co Ci to przypomina? Masz takie urządzenie w domu.
To pilot TV. Raz podajesz wartość „plus” –>głośność rośnie. Podasz „zero”–> głośność stała. Podasz „minus”–>głośność maleje.
Wniosek-W układzie całkującym sygnał wyjściowy:
a-rośnie lub maleje z prędkością proporcjonalną do sygnału wejściowego
b-jest stały gdy sygnał wejściowy jest zerowy
Punkt b jest właściwie zawarty w p. a
Teraz już wiesz, dlaczego na wejście podajemy stosunkowo małe wartości. Przy dużych wartościach sygnał wyjściowy poleciałby błyskawicznie do +/- nieskończoności i byłoby po zabawie.
Powtórz eksperyment z członem całkującym gdy:
Ti=0.5 sekundy
Ti=2 sekundy
Przy zmianie parametrów przydadzą się Rys. 7-4 i 7-5 z poprzedniego rozdziału.
Dla Ti=0.5 sek. przebieg będzie będą 2 razy szybszy niż dla Ti=1 sekunda.
Dla Ti=2 sek. będzie 2 razy wolniejszy.
Rozdz. 8.3 Schemat z suwakiem i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/02_całkujący_suwak_oscyloskop.zcos

Rys. 8-4
Trzeci sygnał=0 na MUX służy do rysowania osi zerowej wykresu.
Wciśnij „start” i powtórz te same ruchy suwaka co poprzednio.
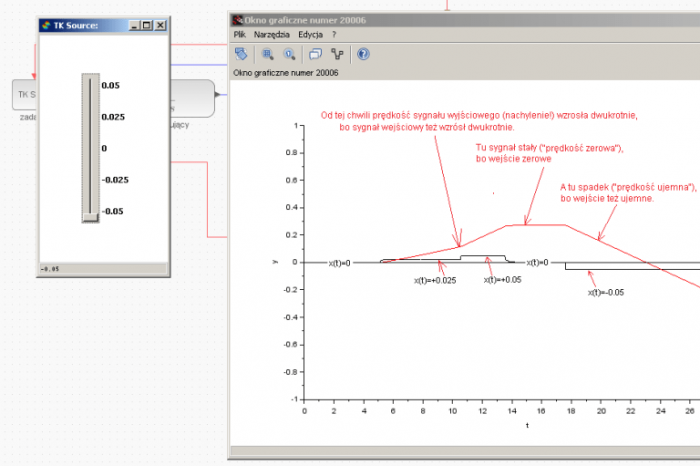
Rys. 8-5
Sygnał wejściowy x(t) ustawiaj suwakiem. U mnie do 5 sekundy było x(t)=0—>y(t)=0. Potem ustawiłem x(t)=+0.025–> y(t) zaczęło narastać…itd. Reszta komentarza na wykresie. Wyraźnie widać, że prędkość narastania (lub opadania!) sygnału wyjściowego y(t) jest proporcjonalna do sygnału wejściowego x(t).
Podkreślam – prędkość sygnału wyjściowego y(t), a nie jego wartość!
Do dokładnego ustawienia sygnału x(t)=0 wykorzystaj miernik cyfrowy.
Rozdz. 8.4 Schemat ze skokiem jednostkowym i oscyloskopem
Poprzedni schemat, gdy sygnał wejściowy pochodził z suwaka, umożliwiał wstępną analizę układu całkującego. Trudno było jednak precyzyjnie ustalić wartość skoku. Dlatego suwak zamienimy na dokładniejszy generator skoku jednostkowego. Ściślej będzie będzie to skok x(t)=0.1
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/03_całkujący_1_skok_oscyloskop.zcos
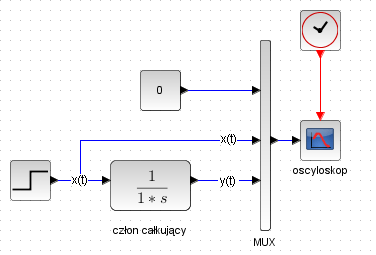
Rys. 8-6
Wciśnij „start”

Rys. 8-7
Odpowiedź członu całkującego o Ti=1 sek. na skok o amplitudzie 0.1
Po czasie t=Ti=1 sek. sygnał wyjściowy y(t) zrównał się z wejściowym x(t).
Wiedząc jak się zmienia w Xcosie parametry transmitancji, powtórz doświadczenie dla Ti=2 sek.
Nie wywołujemy więc nowego schematu ale:
– po zakończeniu symulacji (10 sek) zamknij okno wykresu („okno oscyloskopowe”)
– zmień parametr z Ti=1 sek na Ti=2 sek
– ponownie wciśnij „start”

Rys. 8-8
Zgodnie z oczekiwaniem sygnał będzie rósł 2 razy wolniej. Zrównanie nastąpiło po czasie t=Ti=2 sek.
Teraz możemy zdefiniować czas całkowania Ti dla członu całkującego z Rys. 8-1
Jest to czas Ti, po którym wyjście y(t) zrówna się z wejściem x(t) typu skok.
Uwaga:
Zamykając Xcos-a, program Scilab zapyta czy chcesz zapisać zmiany? Odpowiedz NIE! Bo przy TAK i ponownym wywołaniu schematu na Rys. 8-7 będzie Ti=2 sek i będzie to niezgodne z opisem!
Rób tak zawsze, gdy coś majstrujesz przy bloku transmitancji. Chyba, że robisz to świadomie.
Rozdz. 8.5 Schemat z 2 „schodkami” i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/04_całkujący_2_skoki_oscyloskop.zcos
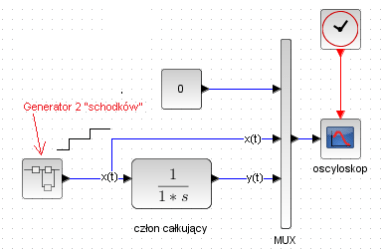
Rys. 8-9
Generator „dwuschodkowy” został zbudowany z 2 przesuniętych w czasie i dodanych do siebie skoków jednostkowych.
Wciśnij „Start”

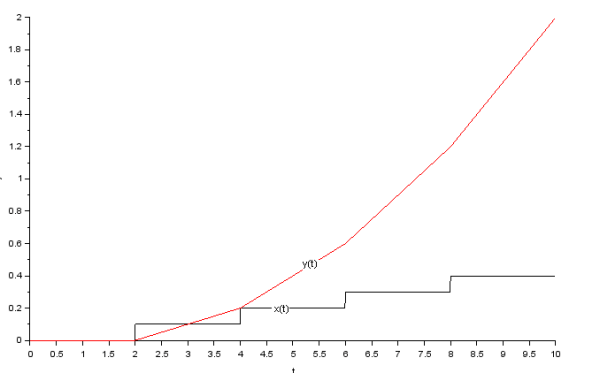
Rys. 8-10
Gdy sygnał wejściowy wzrósł 2-krotnie to prędkość sygnału wyjściowego też wzrosła 2-krotnie.
Rozdz. 8.6 Schemat z 4 „schodkami” i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/05_całkujący_4_skoki_oscyloskop.zcos

Rys. 8-11
Wciśnij „Start”
Rys. 8-12
Na każdy wzrost sygnału wejściowego, człon całkujący reaguje wzrostem prędkości narastania!
Sygnał wejściowy x(t) możemy teraz „z grubsza” traktować jako sygnał narastający liniowo. Sygnał wyjściowy, też „z grubsza”, jako parabolę czyli narastający kwadratowo. Podkreślam „z grubsza”!
Gdyby tych schodków było nieskończenie dużo, to x(t) zamieni się w piłę – sygnał narastający liniowo. Czy odpowiedzią będzie parabola?
Rozdz. 8.7 Schemat z sygnałem narastającym liniowo i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/06_całkujący_pila_oscyloskop.zcos

Rys. 8-13
Wciśnij „Start”
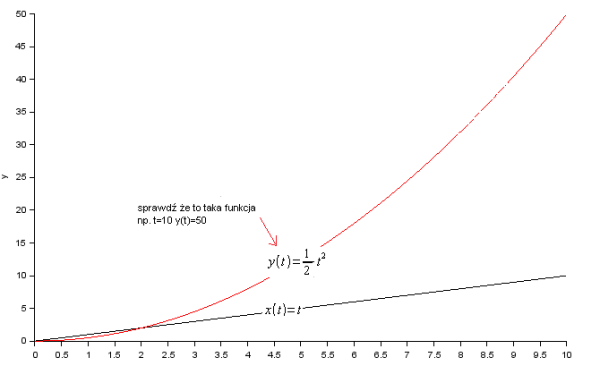
Rys. 8-14
Gdy sygnał wejściowy narasta liniowo x(t)=t to y(t) rośnie jak funkcja kwadratowa. Sprawdź, podstawiając różne wartości pod t.
Człon całkujący jak sama nazwa wskazuje całkuje sygnał wejściowy x(t) dając na wyjściu parabolę.y(t)
Z drugiej strony analiza matematyczna mówi że całka oznaczona z funkcji x(t)=t też jest parabolą:

Rys. 8-15
Czyli teoria zgadza się z praktyką. Jeżeli nie znasz analizy matematycznej, to się nie przejmuj.
Na razie potraktuj, że całką oznaczoną od 0 do t z x(t) jest sygnał y(t) członu całkującego 1/s .
Rozdz. 8.8 Schemat ze skokiem dodatnim i ujemnym i oscyloskopem
Jest to doskonalsza wersja doświadczenia z Rys. 8-5
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/ 07_całkujący_skok_dodatni_ujemny_oscyloskop

Rys. 8-16
Wciśnij „Start”

Rys. 8-17
W podobny sposób regulujesz pilotem głośność w TV, ale tu możesz jeszcze sterować szybkością przesuwania paska.
Może to być też siłownik jako silnik prądu stałego z przekładnią. Wejście to napięcie a wyjście to położenie dźwigni siłownika.
Rozdz. 8.9 Schemat z impulsem Diraca i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/03_człon_całkujący/08_całkujący_dirac_oscyloskop.zcos

Rys. 8-18
W przyrodzie nie ma idealnego impulsu Diraca. Jest tylko jego przybliżenie. Tu impuls prostokątny o amplitudzie 100 i czasie trwania 0.01 sek.
Wciśnij „Start”

Rys. 8-19
Dirac błyskawicznie „naładował” y(t) do wartości 1. Potem chociaż x(t)=0 to y(t)=1. Tak jakbyś naładował kondensator przez rezystancję R=0. Potem kondensator trzyma ten ładunek do końca świata. Teoretycznie oczywiście.
Rozdz. 8.10 Typowe człony całkujące.
Kondensator.
Wejście – prąd ładujący kondensator
Wyjście – napięcie na kondensatorze
Gdy kondensator jest ładowany stałym prądem, to napięcie narasta liniowo, tym szybciej im mniejsza jest pojemność C kondensatora
Wanna zatkana korkiem.
Zakładam, że wanna to prostopadłościan.
Wejście – przepływ wody z kranu, pośrednio stopień otwarcia kranu
Wyjście – poziom wody
Jeżeli przepływ jest stały, to poziom będzie narastał liniowo. Tym szybciej im mniejsza jest powierzchnia wanny.
Siłownik elektryczny.
Zakładam że mamy idealny silnik prądu stałego z przekładnią.
Wejście – napięcie na silniku
Wyjście – kąt położenie wału siłownika
Stałe napięcie na silniku spowoduje liniowy przyrost kąta. Prędkość przyrostu jest proporcjonalna do napięcia
