





Artykuł z serii: Kurs regulacji PID - Wirtualne Laboratorium
Rozdz. 12.1 Wstęp
Rys. 12-1
Transmitancja członu całkującego z inercją.
Pamiętasz człon całkujący? Skok x(t) na wejściu powodował wzrost sygnału wyjściowego y(t) do nieskończoności ze stałą prędkością. Podkreślam. Ze stałą prędkością od początku skoku x(t).
Człon całkujący z inercją też dąży do nieskończoności. Ale robi to trochę inaczej. Na początku skoku x(t) „rozpędza” się począwszy od prędkości V=0 i skończywszy na pewnej ustalonej V=const. Jest więc dokładniejszym przybliżeniem np. siłownika niż idealny człon całkujący.
Rozdz. 12.2 k=1 T=3 sek z suwakiem i bargrafem
Znowu zaczniemy od bargrafu, gdzie wstępnie zapoznasz się z dynamiką.
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/07_calkujacy_z_inercja/01_całkujący_z_inercją_bargraf.zcos

Rys. 12-2
Wciśnij „start”.

Rys. 12-3
Ustaw widok tak żeby widzieć suwak i 2 mierniki cyfrowe. Suwak wstępnie ustawiony jest na 0. Podaj nim max-a. Zaobserwujesz przebiegi podobne jak dla wcześniej badanego członu całkującego. Też musisz podać 0 na wejście,żeby zatrzymać sygnał wyjściowy. Dla ustawienia 0 przyda się miernik cyfrowy. Jeżeli udało Ci się zatrzymać y(t) (nie rośnie i nie maleje), to ujawni się typowa cecha regulatorów PI lub PID.
Ustalone wyjście regulatora yr(t) jest różne od zera, chociaż na wejściu jest zero!
Przebiegi są podobne jak dla członu całkującego , ale nie takie same! Mam nadzieję, że widzisz inercję. Zwłaszcza, gdy podasz +max-a i za chwilę -max-a. Zauważysz, że sygnał przez krótki czas nadal rośnie, chociaż „kazałeś” mu maleć! Zjawisko inercji będzie wyraźniejsze, gdy przebiegi czasowe będziesz obserwować na oscyloskopie.
Rozdz. 12.3 k=1 T=3 sek ze skokiem i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/07_calkujacy_z_inercja/02_całkujący_z_inercją_skok_oscyloskop.zcos

Rys. 12-4
Człon całkujący z inercją to szeregowe połączenie członu całkującego i inercyjnego.
Wciśnij „Start”

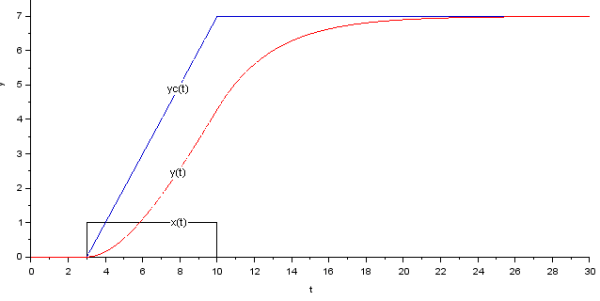
Rys. 12-5
Na wejście podawany jest skok x(t)=1. Niebieskie yc(t) to przebieg za całkującym, czerwone y(t) to wyjście. Na początku wyraźnie widać inercję. W stanie ustalonym obydwa sygnały rosną z taką sama prędkością. Człon całkujący z inercją jest przykładem tzw. układu astatycznego. Przy niezerowym x(t), sygnał y(t) rośnie albo maleje. Dlatego trudno tu zastosować klasyczną definicję wzmocnienia jako k=y(t)/x(t) w stanie ustalonym. Dla tego członu wzmocnienie K jest prędkością y(t) w stanie ustalonym, gdy x(t)=1 (jest skokiem jednostkowym). Tu jak wynika z „trójkąta prędkości” K=1/sek. Wyznaczenie parametru T jest oczywiste.
Proponuję zbadanie jeszcze tych transmitancji:

Rys. 12-6
Aby zmienić nastawy, kliknij prawą myszą na odpowiednim bloku na schemacie i zmień nastawę.

Rys. 12-7
Zmień też parametr k, aby przekonać się, że decyduje on o prędkości wzrostu. (albo spadku, gdy x(t) jest ujemne)
Rozdz. 12.4 k=1 T=3 sek z pojedynczym impulsem prostokątnym i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/07_calkujacy_z_inercja/03_całkujący_z_inercją_1_impuls_oscyloskop.zcos

Rys. 12-8
Na człon całkujący z inercją działa pojedynczy impuls prostokątny.
Wciśnij „Start”
Rys. 12-9
Jest to dokładniejsze przybliżenie członu wykonawczego – silnika z przekładnią jako idealnego członu całkującego, którego ramię może sterować położeniem zaworu. Ten przykład omówiony został w rozdziale 8. Człon całkujący.
Tu natomiast uwzględniamy jeszcze inercję. Czarne x(t) wejście to napięcie na silniku a czerwone wyjście y(t) to położenie trzpienia zaworu.
Nie muszę dodawać, że inercja, zawierająca w sobie głównie bezwładność mechaniczną + trochę bezwładności elektrycznej- inukcyjności, „psuje” jakość urządzenia.
W siłowniku trudno byłoby wyodrębnić sygnał yc(t) -bezpośrednio za całkującym. Jest to możliwe tylko w modelu, tak jak na Rys. 12-8.
Zobaczmy jeszcze jak działa siłownik, który „szuka” swojego położenia. Tzn. raz kręci w jedną stronę, a raz w drugą i czasami stoi.
Rozdz. 12.5 Człon całkujący z inercją k=1 T=1.25 sek z dodatnim i ujemnym impulsem prostokątnym i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/07_calkujacy_z_inercja/04_całkujący_z_inercją_2_impulsy_oscyloskop.zcos

Rys. 12-10
Na Człon całkujący z inercją działają kolejno impuls prostokątny dodatni i ujemny.
Wciśnij „Start”

Rys. 12-11
Niebieskie yc(t) to idealny siłownik bez inercji. Czerwone y(t) to prawdziwy siłownik z inercją.
Siłownik z Rys. 12-8 z inercją T=3 sek kupił biedny Klient. Teraz natomiast Klientem jest Panisko, które chce żeby siłownik szybko reagował. Sprzedałem Mu siłownik z inercją T=1.25 sek. Efekty są widoczne. Siłownik szybciej dochodzi do prędkości ustalonej. Dlatego szybciej też osiągnie ustalone y(t). Najpierw dodatni impuls ustawił trzpień na wartość y(t)=8, siłownik trochę postał (bo tak sobie życzył np. regulator) a potem ujemnym impulsem ustawił trzpień na y(t)=4.
