





Dzisiejszym artykułem chciałbym przybliżyć oraz jednocześnie zachęcić osoby, które nie miały styczności z firmą Omron do skorzystania z jej produktów. Początkowo miał powstać jeden duży artykuł, lecz jest to mój pierwszy wpis. W pewnej chwili odniosłem wrażenie, ze tekst staje się chaotyczny i stąd pomysł podzielenia go na kilka etapów. Stąd też proszę o wyrozumiałość 😉 Zapraszam do lektury.
W swym portfolio Omron pochwalić się może bardzo szeroką gammą produktów. Dziś chciałbym się skupić przede wszystkim na ich oprogramowaniu, którego wielką zaletą jest wspólne środowisko programistyczne – Sysmac Studio dla wielu osprzętów. Z jego poziomu możemy parametryzować i programować:
- falowniki serii MX2 oraz RX czy najnowsze QA2,
- serwonapędy,
- panele HMI,
- sterowniki PLC.
Samo środowisko jest niezwykle przejrzyste i intuicyjne. Wymiana danych pomiędzy sterownikiem, wyspami IO czy falownikami odbywa się za pośrednictwem protokołu EtherCat lub EtherNet IP.

Tworzenie programu
Tworzenie programu rozpoczynamy poprzez stworzenie nowego projektu oraz wybranie sterownika PLC, dla którego będziemy tworzyć program. Oprócz standardowych projektów środowisko umożliwia tworzenie własnych bibliotek, które możemy później wykorzystywać w naszym programie.
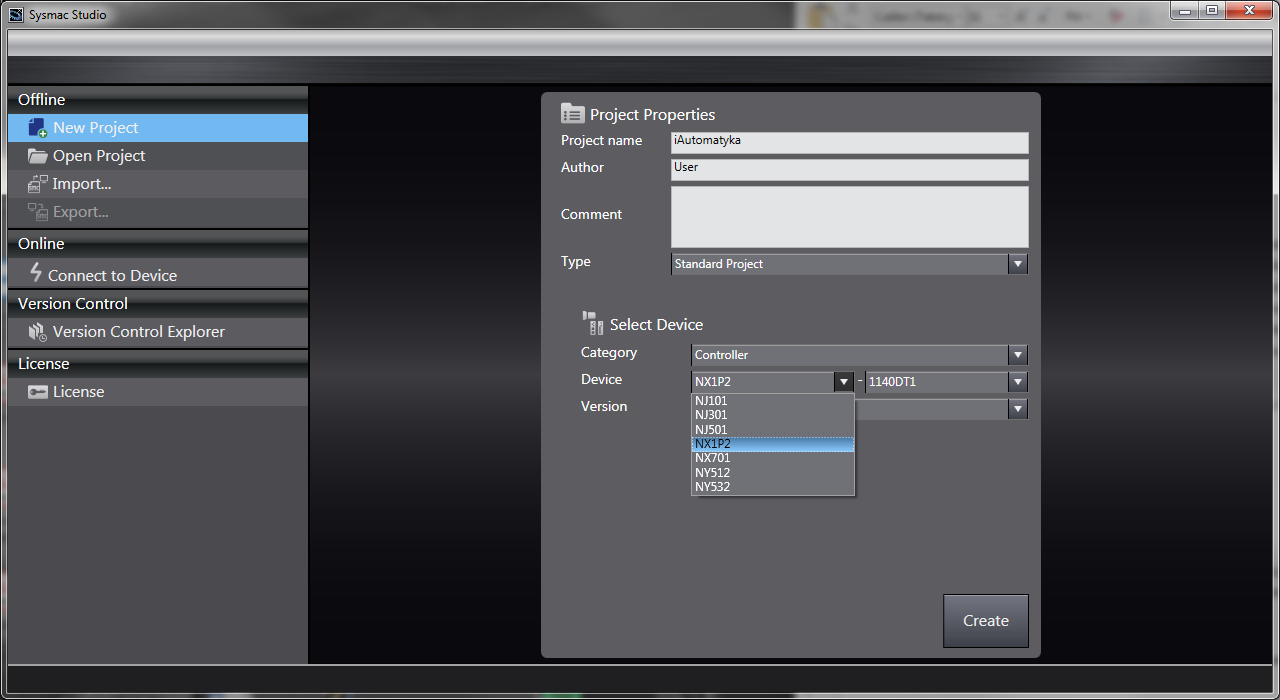
Po stworzeniu nowego projektu i wybraniu typu naszego sterownika (oczywiście w trakcie tworzenia programu istnieje możliwość zmiany typu sterownika) naszym oczom ukazuje się główne okno programu.

Składa się ono z :
1 – Zakładki służącej do przemieszczania się pomiędzy poszczególnymi sekcjami środowiska. Składa się ono z podokna konfiguracyjnego oraz drugiego służącego do tworzenia programu. Z poziomu zakładki Configurations and Setup możemy wyróżnić następujące podstrony:
- EtherCat – w której budujemy strukturę sieci komunikacyjnej pomiędzy lokalnymi układami WE/WY, falownikami, servami czy innymi urządzeniami.
- CPU/Expansion Racks – jeśli chcemy w obrębie sterownika dołożyć dodatkowe karty wejść, wyjść, enkoderowe czy inne do dodajemy je właśnie w tym miejscu
- I/O Map – jedna z ważniejszych zakładek w mamy dostęp do wszystkich rodzajów wejść/wyjść zadeklarowanych w obrębie programu. Z poziomu tej zakładki definiujemy również nazwy zmiennych. Możemy to zrealizować na dwa sposoby poprzez nadawanie własnych nazw zmiennych lub poprzez zaznaczenie zmiennych i kliknięcie opcji Create Device Variable. Wówczas program sam przypisze dla zaznaczonych miejsc domyślne nazwy zmiennych.

- Controller Setup – w tym miejscu definiujemy ustawienia sterownia takie jak np. ustawienie IP sterownika, obsługa kart SD czy opcjonalnych kart rozszerzeń ( opcja ta dostępna jest tylko dla sterowników z rodziny NX1P2). Jeśli chcemy wymieniać dane pomiędzy sterownikami w obrębie sieci EtherNet to właśnie w tymi miejscu definiujemy zmienne do komunikacji.
- Motion Control Setup – zakładka odpowiedzialna za konfigurację sterowania ruchem.
- Cam Data Setting – umożliwia tworzenie tzw. Krzywek elektronicznych.
- Task Setting – Określa sposoby wykonywania zadań. Program umożliwia zdefiniowanie okresu oraz czasu wykonywania przez zadania, odświeżania wejść/wyjść czy określenia które zmienne mają być współdzielone przez różne zadania.
- Data Tracing – narzędzie służące do śledzenia danych do próbkowania zmiennych bez dodatkowego próbkowania. Użytkownik ma do wyboru dwie metody śledzenia: ciągłe lub po spełnieniu danego warunku wyzwalającego śledzenie.
2 – Toolbox bardzo istotna zakładka przyjmująca opcję w zależności w sekcji środowiska w jakim obecnie pracujemy. Pozwala na dostęp do kart opcjonalnych czy urządzeń podczas budowy struktury sieci EtherCat czy do bloków funkcyjnych przy tworzeniu algorytmu programu
3 – Klasyczne umiejscowienie skrótów do najważniejszych funkcji środowiska
4 – Okno robocze – w zależności od podstrony na której jesteśmy służy do wyświetlania i edycji poszczególnych parametrów lub kodu programu.
5 – Okno wyświetlające wynik kompilacji programu, to w nim wyświetlane są informacje o błędach lub ostrzeżeniach
Tworzenie sieci EtherCat
Tyle tytułem krótkiego wstępu i pobieżnego opisu funkcjonalności programu. Przejdźmy do tworzenia sieci EtherCat. W tym celu otwieramy zakładkę EtherCAT.

Zasada tworzenia sieci polega na wybraniu interesującego nas modułu z Toolboxa oraz dwukrotnym kliknięciem myszki na niego. Wówczas dany element zostanie dodany do naszej sieci. Wyszukiwania elementów możemy dokonywać z rozwijanej listy, w której to elementy są pogrupowane według funkcjonalności (serva, falowniki, wyspy) czy też wpisując w wyszukiwarce nazwę poszukiwanego modelu.

Po dodaniu elementów i podświetleniu jednego z nich po prawej ukazują się informacje na temat danego urządzenia typu slave. W tym miejscu możemy zmienić nazwę danego węzła, zmienić mu Node Adrres czy też edytować zaawansowane ustawienia. Dodatkowo każdy dodany element pojawia się jako podstrona zakładki EtherCAT.
Chcąc edytować daną wyspę wybieramy z menu Configurations and Setup interesujący nas moduł np. Node 4 i edytujemy go. Tworzenie wysp odbywa się na tej samej zasadzie co budowa struktury sieci.

Z poziomu tej samej zakładki możemy edytować parametry falowników. Dane okno prezentuje również jakie ustawienia przypisane są jako domyślne. W przypadku edycji jednego z parametrów przy oznaczeniu danej opcji, kontrolka w programie zmienia swój kolor z szarego na czerwony. Dzięki czemu w szybki sposób użytkownik może zlokalizować wprowadzone przez siebie zmiany.

Ciąg dalszy nastąpi…
I to by było na tyle w cz 1. Myślę, że udało mi się przedstawić ułamek możliwości środowiska. W kolejnych częściach postaram się przedstawić tworzenie programu, safety, czy kontrolę serw oraz tworzenie krzywek. Dziękuję za uwagę.
 Nagrodę Klawiatura bezprzewodowa bluetooth + klucz do szaf dostarcza ambasador konkursu, firma Multiprojekt. |
{kind=link}