




Pewnego dnia jako Utrzymanie Ruchu dostaliśmy zadanie uruchomienia po postoju sprężarki, będącej solidną radziecką konstrukcją. Dokumentacja była dostępna jedynie po rosyjsku (sporządzona została cyrylicą). Jakby mało było niespodzianek, w sterowaniu zastosowano układ Leonarda. Coś, co my – młodzi inżynierowie automatycy i elektrycy – na laboratoriach traktowaliśmy jako przeżytek i ,,sztukę dla sztuki’’. Obecnie w dobie napędów energoelektronicznych faktycznie taki układ przeszedł do lamusa, ale niektóre układy dalej działają i są wykorzystywane. A my – utrzymanie ruchu – mamy obowiązek je znać, naprawiać i konserwować.
Geneza powstania
Od początku stosowania silników elektrycznych istniała konieczność regulacji prędkości obrotowej maszyny. Obroty silnika DC można regulować przez zmianę rezystancji obwodu twornika (od nominalnej w dół) lub wzbudzenia (od nominalnej w górę) oraz zmianę napięcia zasilającego. Obroty silnika AC pierścieniowego można regulować przez zmianę rezystancji wirnika, zaś klatkowego tylko poprzez zmianę częstotliwości napięcia zasilającego. Oczywiście stosowanie rezystorów przynosi straty w postaci energii traconej jako ciepło.
Co jednak w sytuacji, gdy potrzebujemy płynnej i szerokiej możliwości regulacji prędkości obrotowej napędu, a sposób ma być jak najbardziej ekonomiczny? Przed takim wyzwaniem stanęli inżynierowie pod koniec XIX wieku. Falowników i innych przekształtników wtedy jeszcze oczywiście nie było. Rozwiązanie znalazł Harry Ward Leonard w 1891 roku.
Budowa układu
Główną zaletą układu jest płynna regulacja prędkości napędu. Bezpośrednio z niej wynika główna wada, czyli układ potrzebuje minimum trzech (!) maszyn – dwóch silników i prądnicy. Silnik asynchroniczny M1 napędza obcowzbudną prądnicę prądu stałego G2, która jest źródłem napięcia dla obcowzbudnego silnika prądu stałego M2, będącego właściwym napędem. Potrzebne jest jeszcze źródło napięcia wzbudzenia dla prądnicy G2 – z zewnętrznego źródła albo (a jakże!) czwarta maszyna w układzie – wzbudnica G1, będąca również prądnicą, tylko samowzbudną. Podstawowy układ Leonarda stanowią zatem silnik AC, silnik DC, prądnica obcowzbudna i prądnica samowzbudna. Połączenie elektryczne G2– M2 bywa nazywane wałem elektrycznym.
Mechanizm działania
Regulacja prędkości silnika w tym układzie odbywać się może na kilka sposobów. Najprościej regulujemy wzbudzenie prądnicy G2, co zmienia napięcie zasilające silnik M2 i pozwala regulować prędkość od zera do wartości powyżej nominalnej (podobnie jak układy tyrystyrowe). Do tego można dodatkowo regulować wzbudzenie samego silnika M2, co pozwoli uzyskać dokładniejszą regulację.
Zastosowanie
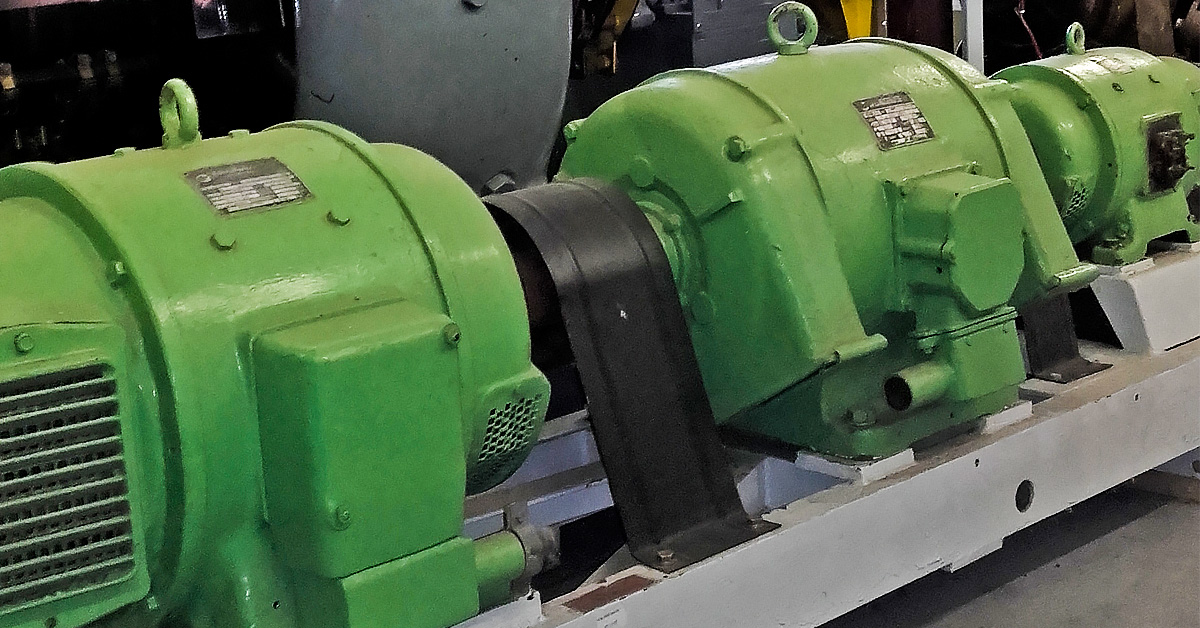
Układ Leonarda stosowano tam, gdzie istniała potrzeba regulacji prędkości obrotowych dużych napędów. Przeważnie były to windy, dźwigi i inne maszyny wyciągowe. W moim zakładzie układ Leonarda jest zastosowany do regulacji prędkości obrotowej sprężarki. Silnik AC jest silnikiem 6 kV.
Podsumowując, układ Leonarda jest dość prostym, ale zajmującym dużo miejsca układem do regulacji prędkości. Obecnie został zastąpiony przez układy energoelektroniczne, ale w wielu miejscach jeszcze z powodzeniem układy te pracują i warto mieć podstawową wiedzę na temat tego rozwiązania sprzed prawie 130 lat.
A w sprężarce wymieniliśmy m.in. taki przekaźnik (wyprodukowany w latach 70.) na nowy – też z lat siedemdziesiątych (!).

Źródła:
http://www.newimiue.ipnet.pl/dokumenty/E-20.pdf
https://bezel.com.pl/2018/08/01/maszyny-pradu-stalego
 Nagrodę Voucher na szkolenie + kubek termiczny + zestaw gadżetów dostarcza ambasador konkursu, firma Mitsubishi Electric. |
{kind=link}