





W moim poprzednim artykule omówiłem podstawy tworzenia projektu safety w TIA PORTAL. Tym razem postaram się wprowadzić was w świat TwinSAFE sterowników Beckhoff. Artykuł ten jest skierowany do osób znających podstawy TwinCat3 oraz podstawowe zagadnienia systemów bezpieczeństwa omówione w poprzednim artykule. Pomimo tego, że poprzedni artykuł dotyczy Siemensa, to pozwoli on zrozumieć podstawowe zasady dotyczące systemów bezpieczeństwa. Fundamentalna zasada działania całego systemu bezpieczeństwa pozostaje identyczna, różnica wynika z samego tworzenia projektu.
W celu stworzenia nowego projektu safety należy kliknąć PPM na zakładkę SAFETY. W nowo otwartym oknie pojawią się do wyboru 3 opcje pozwalające na stworzenie pustego projektu lub projektu ze skonfigurowanymi wejściami.

Wybierając pierwszą opcję TwinCat stworzy projekt z plikiem .sds, który stanowi miejsce w którym możemy podlinkować sygnał wymieniany pomiędzy projektem Safety a modułami safety lub innym projektem (np. PLC). Sekcja ta zostanie omówiona dokładniej poniżej.
HARDWARE
Wszystkie bezpieczne sygnały powinny mieć swój początek i koniec na kartach bezpieczeństwa, co najlepiej przedstawia poniższy rysunek. Rozwiązanie to pozwala na dodatkowe sprawdzanie połączenia poprzez sygnał PULSE. W przeciwieństwie do rozwiązania Siemensa polegającego na hardware’owym połączeniu redundancji sygnałów, w tym wypadku trzeba to zrobić manualnie.
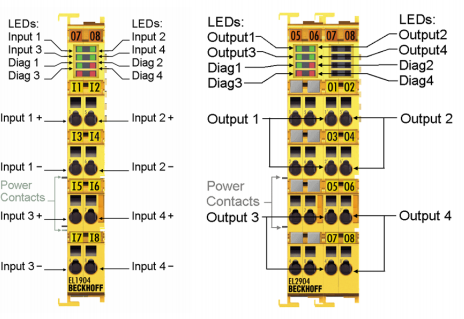 Każde urządzenie TwinSAFE powinno posiadać swój adres FSOE, który musi być unikalny w całej sieci, adresy ustala się binarnie za pomocą dip switch’y. Kiedy ustalimy adresy wszystkich urządzeń w sieci, należy przeprowadzić konfigurację samego sterownika bezpieczeństwa.
Każde urządzenie TwinSAFE powinno posiadać swój adres FSOE, który musi być unikalny w całej sieci, adresy ustala się binarnie za pomocą dip switch’y. Kiedy ustalimy adresy wszystkich urządzeń w sieci, należy przeprowadzić konfigurację samego sterownika bezpieczeństwa.
Aby dokonać konfiguracji sterownika bezpieczeństwa, należy wybrać zakładkę Target System, co spowoduje otwarcie poniższego okna.

W przypadku połączenia ze sterownikiem TwinCat sam wykryje sterownik bezpieczeństwa, który zostanie wskazany w zakładce Physical Device oraz jego adres FSOE, który zostanie wyświetlony w zakładce Hardware Adress. Klikając PPM na okno projektu safety oraz wybierając opcję Check safe adresses możemy podejrzeć adresy FSOE wszystkich urządzeń bezpieczeństwa wchodzących w skład sieci.
W przypadku manualnego dodawania należy wybrać odpowiedni model sterownika bezpieczeństwa w zakładce Target System oraz ustalić jego adres FSOE w zakładce Safe adress.
Konfiguracja hardware modułów bezpieczeństwa powinna zostać w pierwszej kolejności dodana do konfiguracji I/O sieci EtherCAT, w tym celu należy przejść do Config Mode, a następnie przeskanować sieć klikając PPM na zakładkę EtherCAT i wybrać opcję scan.
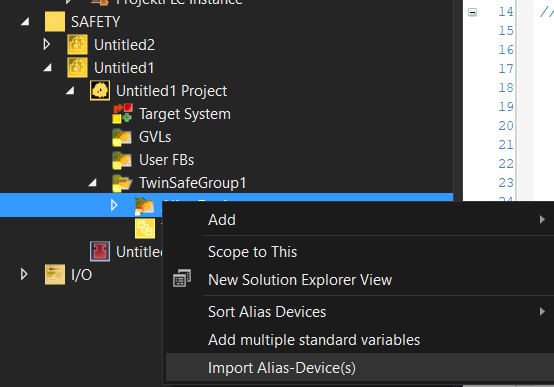
Po dokonaniu powyższych czynności możemy importować uprzednio dodane moduły do projektu Safety. W tym celu należy rozwinąć odpowiednią grupę a następnie kliknąć PPM na folder Alias Devices i wybrać opcję Import Alias Devices. Podzielenie projektu na grupy pozwala na strukturyzację całego algorytmu i pozwala na lepszą kontrolę nad maszyną, same moduły mogą zostać przyporządkowane do poszczególnych grup.
Przykład: Linia produkcyjna składa się z 3 osobnych stanowisk, z których każde zostało odpowiednio odgrodzone. Przy każdym ze stanowisk znajduje się rozproszona wyspa EK1100, która zawiera odpowiednie moduły bezpieczeństwa. Projekt Safety, został podzielony na 3 grupy, z których każda odpowiada za jedno stanowisko. W przypadku zadziałania algorytmu bezpieczeństwa lub działania powodującego przejście danej grupy w tryb zatrzymania pozostałe grupy mogą dalej działać.
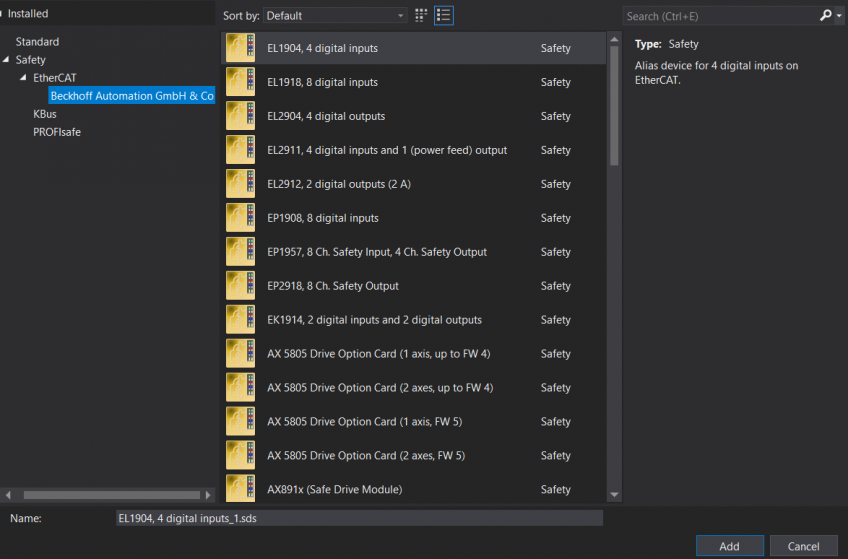
Moduły mogą również zostać dodane manualnie, w tym celu należy kliknąć PPM na folder Alias Devices, wybrać opcję Add New Item, a następnie wybrać moduł który nas interesuje.
Po dodaniu modułu należy ustalić jego adres FSOE który powinien być zgodny z tym ustawionym na dip switch’ach. W przypadku połączenia komputera ze sterownikiem możemy go odczytać klikając ikonę odświeżenia w zakładce Dip Switch.

Należy w tym miejscu również wspomnieć o dość ważnej kwestii, która może stwarzać potencjalne problemy – w przypadku dołożenia bezpiecznego modułu do konfiguracji projektu, trzeba go wykorzystać. Sytuacja w której którykolwiek moduł będzie widniał w konfiguracji, lecz nie zostanie wykorzystany w programie będzie powodowała błąd.
Każdorazowa aktywacja nowej konfiguracji wymaga podania numeru seryjnego modułu odpowiadającego za logikę safety, nazwy użytkownika oraz hasła (domyślnie TwinSAFE).
SOFTWARE
Gdy ukończymy konfigurację hardware, możemy przystąpić do tworzenia software’owej strony projektu. W projekcie bezpieczeństwa możemy stworzyć listę globalnych zmiennych poprzez kliknięcie PPM na folder GVL oraz bloki funkcyjne poprzez kliknięcie PPM na folder User FBs. Główna funkcjonalność programu znajduje się jednak w folderze TwinSafeGroup, rozwijając go ukaże się nam folder Alias Devices oraz plik TwinSafeGroup.sal.
Folder Alias Devices zawiera wszystkie sygnały wymieniane pomiędzy projektem safety a modułami TwinSAFE oraz innymi projektami. Możemy stworzyć dowolną ilość sygnałów wymienianych pomiędzy projektami, samo tworzenie polega na kliknięciu PPM w ten folder oraz na wyborze typu sygnału (digital, analog, float).

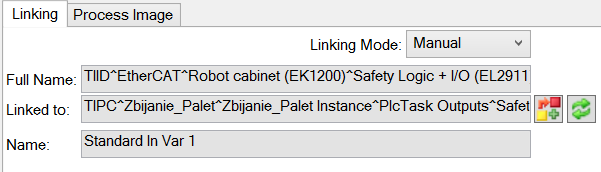
Podlinkowanie sygnału do konkretnej zmiennej polega na kliknięciu pierwszej od lewej ikony znajdującej się przy zakładce Linked to (żółty i czerwony kwadracik oraz zielony plus). Ważną kwestią jest to, że sygnały przychodzące z innego projektu powinny być w nim zadeklarowane jako wyjściowe, zaś sygnały wysyłane do zwykłego projektu należy tam zadeklarować jako wejściowe.
Pliki z rozszerzeniem .sal stanowią programy bezpieczeństwa cyklicznie wywoływane przez sterownik. W tym miejscu należy tworzyć algorytm odpowiadający za bezpieczeństwo. Do tworzenia programów służą bezpieczne bloki funkcyjne przedstawione na poniższym rysunku. Oprócz dedykowanych bloków (np. E-Stop) znajdziemy tu również podstawowe funkcje języka FBD.

Aby stworzyć zmienną, należy po prostu kliknąć wejście lub wyjście danego bloczka i zacząć pisać. Do bloków funkcyjnych należy podpinać sygnały pochodzące z bezpiecznych modułów w zakładce Variable Mapping tak jak przedstawiono na poniższym rysunku. Sygnały wejściowe należy linkować klikając na wielokropek znajdujący się po prawej stronie paska zaznaczenia zmiennej, zaś sygnały wyjściowe klikając na wielokropek znajdujący się po lewej stronie paska.

E-STOP

Obsłużenie przycisku bezpieczeństwa powinno zostać przeprowadzone za pomocą dedykowanego bloczka ESTOP. Na jego wejściu powinny znajdować się sygnały pochodzące z dwóch styków (wynikających z redundancji) przycisku bezpieczeństwa. Spora część bloczków TwinSAFE posiada wejście EDM (zostało one szczegółowo omówione w poprzednim artykule), którego podłączenie nie jest wymagane, lecz z pewnością warto z niego skorzystać. Tak jak w przypadku Siemensa możemy również tutaj skorzystać ze zwykłego oraz opóźnionego wyjścia E-Stop. Czas opóźnienia jest ustalany w środku bloczka w zakładce Delay Time. W przypadku wciśnięcia przycisku bezpieczeństwa należy podać sygnał resetujący na wejście Restart. W tym celu możemy skorzystać ze wcześniej skonfigurowanego sygnału ErrorAcknowledgment.sds. Należy pamiętać, aby użyć też sygnał, który potwierdzi błąd.
SAFEMON

SAFEMON to bloczek służący do bezpiecznego monitorowania pewnego obiektu. Jako obiekt możemy przykładowo uznać zamek bezpieczeństwa lub zewnętrzne urządzenie posiadające redundantne połączenie. Podstawowa obsługa tego bloczka polega na podłączeniu monitorowanych sygnałów na wejścia MonIn. Wyjście MonOut wystawi sygnał wysoki tylko w przypadku gdy na podpięte wejścia MonIn będą podane sygnały wysokie. W przypadku pojawienia się niskiego stanu na którymś z tych wejść nastąpi natychmiastowe wystawienie sygnału niskiego na wyjściu MonOut. Tak jak w przypadku bloczka E-Stop sygnał wyjściowy może zostać opóźniony o pewien czas zdefiniowany w Delay Time.
AND, OR
Zakładam, że każda osoba tworząca projekt bezpieczeństwa zna podstawowe operatory logiczne dlatego nie będę tłumaczył ich działania, ponieważ ich główna funkcja w tym miejscu jest taka sama jak w zwykłym programie PLC. Najistotniejszą kwestią tutaj jest to, że przeprowadzając operację na zmiennej importowanej ze zwykłego projektu PLC można ją podpiąć jedynie na 1 wejście bloczków AND i OR.

SAFE DECOUPLE
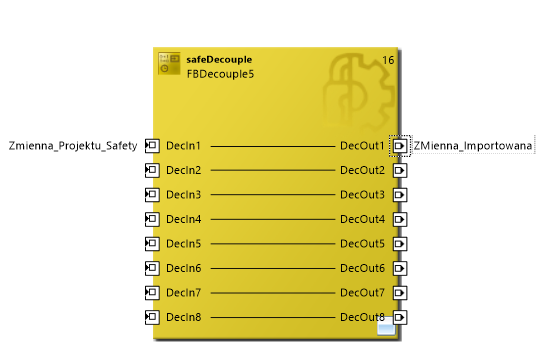
Import sygnału ze zwykłego projektu PLC przebiega w dość prosty sposób omówiony w rozdziale software, lecz w przypadku importu zmiennej z projektu safety do zwykłego sytuacja staje się bardziej skomplikowana. Safe Decouple to bloczek służący do konwersji bezpiecznej zmiennej na zwykłą, pozwala to na jej import do standardowego projektu PLC. Jego działanie polega na podpięciu zmiennej projektu safety na wejście oraz zmiennej, która ma zostać importowana do projektu PLC na wyjście.
PODSUMOWANIE
Mam nadzieję, że powyższy artykuł pozwoli wam lepiej zrozumieć sposób tworzenia projektu bezpieczeństwa w TwinCat3. Chciałbym w tym miejscu również zachęcić wszystkich początkujących automatyków do zapoznania się z programem TwinCat3, ponieważ ze względu na dostępność oraz darmowy dostęp może on doskonale sprawdzić się do nauki programowania PLC.
Ocena artykułu zgłoszonego do Konkursu iAutomatyka 4.0 pisz artykuły, zdobywaj punkty, wymieniaj je na nagrody.
Kryterium 1 2 3 4 5 6 7 8 9 10 Punkty (0-2) 2 1 2 1 2 0 1 0 1 1 Suma zdobytych punktów: 11
