





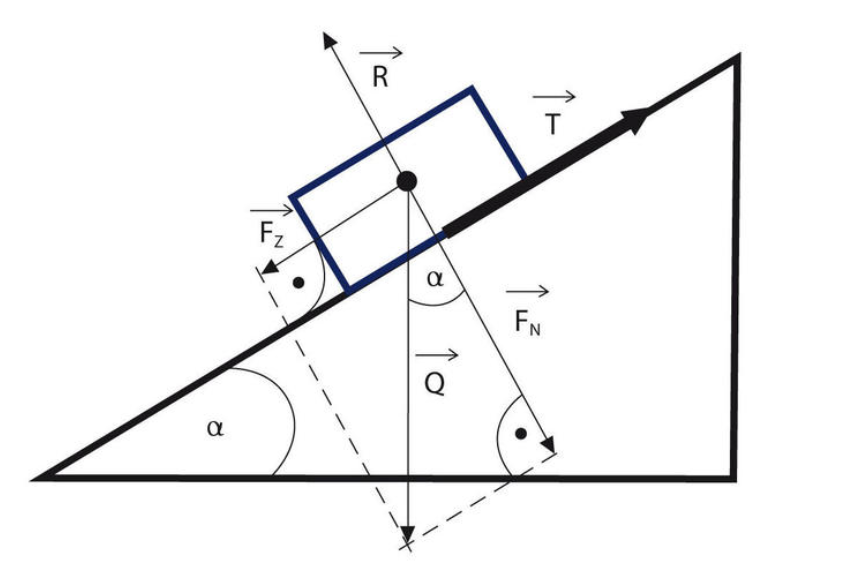
Dynamika układu jest charakterystyczną cechą fizycznych obiektów, która jest ściśle powiązana z praktycznie każdą aplikacją, w której występuje jakikolwiek ruch. W niektórych przypadkach może okazać się szczególnie problematycznym punktem danej maszyny, który przysparza nie lada problemy. Analizując zasady dynamiki Newtona oraz podstawowe prawa fizyki możemy zauważyć, iż problemy, wynikające z dynamiki obiektu mogą wynikać głównie z sił oddziałujących na układ (np. grawitacja, tarcie, masa).
Silniki serwo z założenia powinny umożliwiać dużą kontrolę nad obiektem oraz wysoką precyzję. Pomimo ogromnych możliwości tych silników dynamika obiektu może nam skutecznie utrudnić kontrolę nad nim. W tym artykule postaram się wytłumaczyć ideę tuningu napędów firmy Beckhoff. Całość zostanie przedstawiona na przykładzie serwowzmacniacza serii AX5000.
Pierwsze kroki
Pierwszą rzeczą, którą należy wykonać, aby zapewnić optymalne działanie serwomechanizmu, jest odpowiednia parametryzacja całego obiektu. Przeprowadzenie poprawnej parametryzacji serwonapędu zostało przedstawione w tym artykule.
Kolejną kwestią jest wybór odpowiedniego silnika, którego musimy dokonać w przypadku kiedy posiadamy silnik z resolwerem (silniki z enkoderem absolutnym zostają automatycznie zeskanowane i zatwierdzone w konfiguracji serwowzmacniacza). Wyboru silnika możemy dokonać w sekcji I/O, klikając dwukrotnie w dany serwowzmacniacz, a następnie otworzyć zakładki Drive Manager -> Chanel A/Chanel B -> Configuration -> Motor and Feedback.

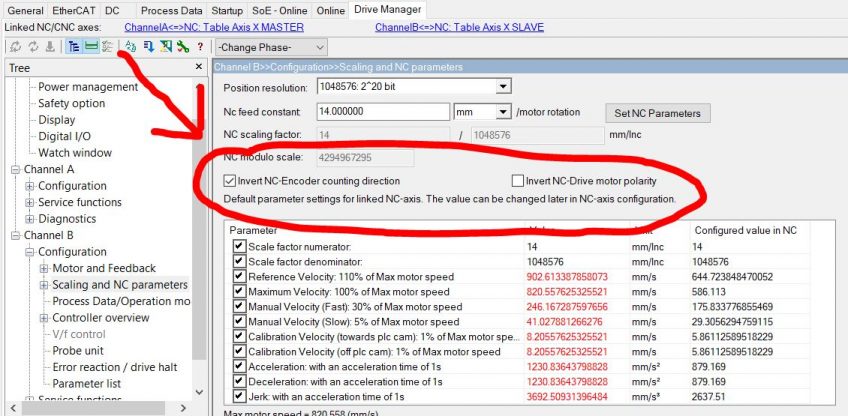
Po zakończeniu parametryzacji układu możemy przystąpić do oceny działania całego obiektu. Pierwszą rzeczą jest uruchomienie samego silnika oraz próba ruchu z niewielką prędkością. W przypadku problemów przy samym uruchomieniu należy zweryfikować wyświetlany kod błędu oraz fizyczny stan samego silnika i serwowzmacniacza. Jedną z trudniejszych do wychwycenia przyczyn błędów może być zaznaczone okno zmiany kierunku enkodera bez zmiany polaryzacji silnika.
W przypadku gdy silnik się uruchamia, lecz występują problemy w samym ruchu (np. pojawiają się błędy przy większym obciążeniu/prędkości) należy przystąpić do właściwego tuningu silnika. Każdy serwomotor firmy Beckhoff posiada dodatkowy zapas momentu pozwalający na krótkotrwałą pracę z parametrami kilkukrotnie wyższymi niż znamionowe. Zastrzyk ponad znamionowej mocy może odgrywać kluczową rolę w przypadku rozpędzania obiektu o dużej inercji lub masie. Zapas dodatkowego momentu i prądu jest określony w parametrach każdego z silników jako peak torque i peak current.

Wykresy
Pierwszą kwestią, którą należy poruszyć, jest sam dobór silnika, ponieważ może się okazać, iż silnik po prostu nie został dobrze dobrany do aplikacji i przeprowadzenie tuningu niewiele pomoże. Praca silnika przy jego szczytowych wartościach maksymalnego prądu z pewnością nie wpłynie korzystnie na jego żywotność i w tym wypadku należy rozważyć wymianę silnika na mocniejszy.
Aby przeprowadzić analizę prądu silnika, należy utworzyć wykres jego pracy. Pierwszym krokiem, który pozwoli nam na to, jest dodanie odpowiednich parametrów do process image serwowzmacniacza. W tym celu należy otworzyć zakładkę Drive Manager->Chanel A/Chanel B->Process Data oraz dodać wartości prądu i momentu do okna Parameters for process data. Dodanie parametrów pozwoli nam na odczyt ich wartości w projekcie PLC lub Scope.

Po dokonaniu powyższych czynności należy utworzyć nowy projekt TwinCAT Measurment, który pozwoli nam na wygenerowanie wykresów danych parametrów. W tym celu należy w górnym lewym rogu wybrać opcję file->add->new project oraz wybrać TwinCAT Measurment-> YT NC Scope.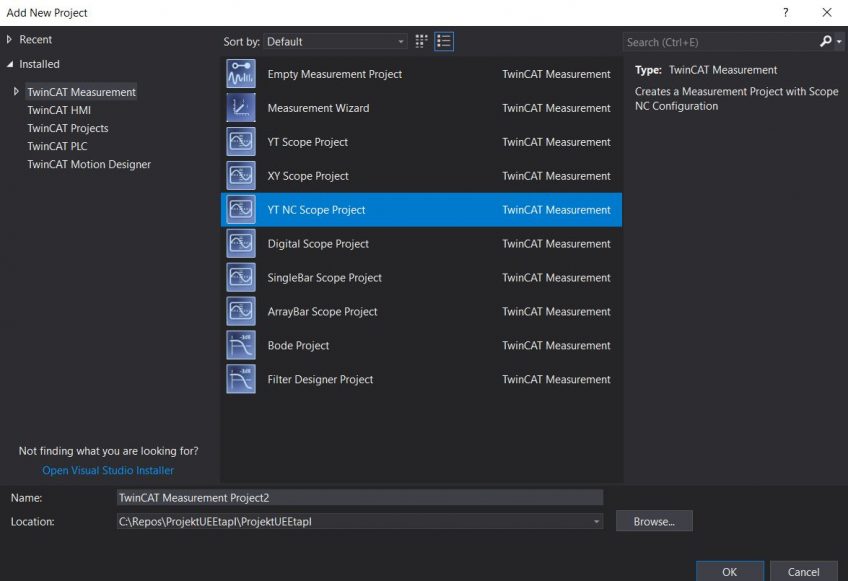
Po utworzeniu projektu należy podlinkować zmienne, do których chcemy mieć podgląd w projekcie scope. W tym celu należy kliknąć ppm zakładkę Data pool, wybrać opcję target browser, a następnie zmienną, która nas interesuje.

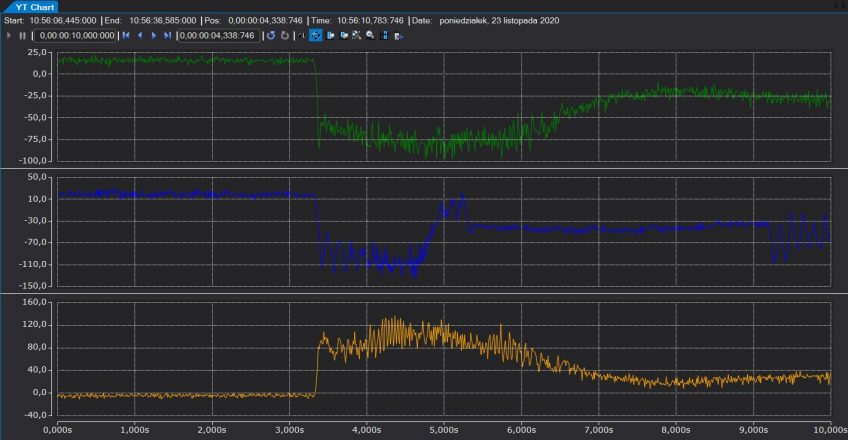
Po dokonaniu powyższych czynności możemy przystąpić do właściwego tworzenia wykresów. Należy uruchomić nagrywanie oraz poruszać osią z różnymi prędkościami/przyśpieszeniami. Po zakończeniu możemy rozpocząć analizę uzyskanych wykresów. W przypadku gdy otrzymane wartości prądu/momentu znajdują się stosunkowo daleko od szczytowych wartości z tabliczki znamionowej, możemy przystąpić do tuningu. W przeciwnym wypadku należy rozważyć wymianę silnika.
TUNING
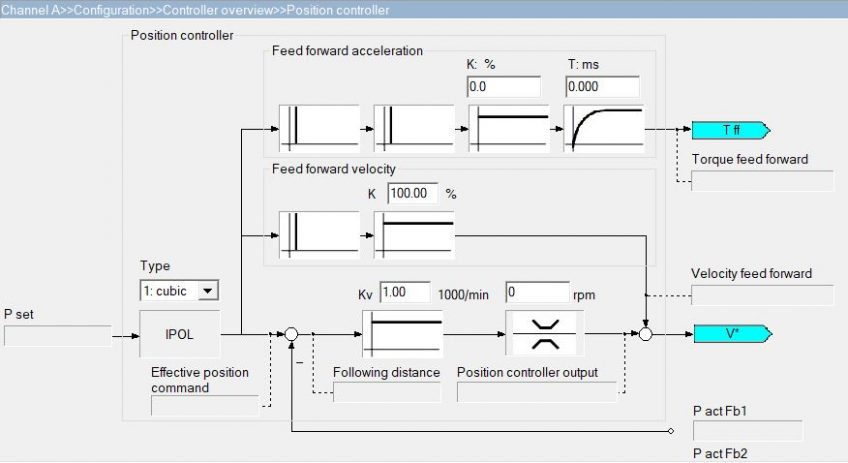
Serwonapęd kontrolowany jest przez 3 regulatory: regulator pozycji, regulator prędkości oraz regulator prądu. Ich zadaniem jest optymalny dobór energii dostarczanej do silnika tak, aby w możliwie najlepszy sposób przeprowadzić dany ruch.
Przed rozpoczęciem właściwego tuningu należy wyłączyć regulator pozycji osi oraz analogicznie monitoring uchybu pozycji. Aby wyłączyć regulator pozycji, należy ustawić jego wzmocnienia na 0, wyłączenie monitoringu uchybu polega na ustawieniu wartości FALSE w opcji Position Lag Monitoring w oknie Parameters.

Podgląd poszczególnych regulatorów został przedstawiony na poniższych rysunkach. Możemy tam dokonać ograniczeń poszczególnych parametrów takich jak np.: maksymalne obroty, maksymalna prędkość, maksymalny moment.

Przeprowadzenie samego tuningu opiera się w głównej mierze na optymalnym doborze wzmocnienia regulatora prędkości. Aby rozpocząć tuning, należy uruchomić silnik w powtarzalnej sekwencji przy zastosowaniu możliwie agresywnych ramp przyśpieszania i zwalniania. Uruchomienia powtarzalnej sekwencji możemy dokonać w zakładce functions w oknie danego serwonapędu. W tym celu należy wybrać opcję reversing sequence oraz ustalić pozostałe parametry określające punkty i prędkość, z jaką ma poruszać się serwo.

Rampy przyśpieszania oraz zwalniania mogą zostać ustawione w zakładce dynamics.

Po uruchomieniu powtarzalnej należy otworzyć wcześniej utworzony projekt Scope oraz uruchomić nagrywanie. Podczas ruchu osi możemy przystąpić do regulacji wartości wzmocnienia regulatora prędkości. Regulację należy rozpocząć od najmniejszej wartości, stopniowo zwiększając aż do osiągnięcia optymalnej charakterystyki regulacji (krótki czas regulacji, małe przeregulowania). 
Zbyt niska wartość wzmocnienia będzie powodowała długi czas regulacji zaś zbyt wysoka przeregulowania i głośną pracę silnika.
Po dobraniu optymalnych wartości należy ponownie włączyć monitorowanie uchybu pozycji oraz dobrać odpowiednią wartość wzmocnienia regulatora pozycji, aby uzyskać jak najmniejszą wartość uchybu po zatrzymaniu silnika.

Podsumowanie
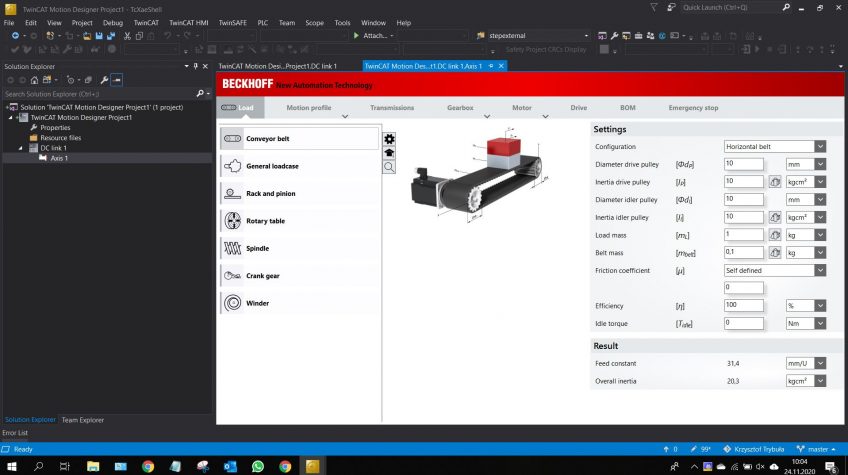
Na zakończenie chciałbym zachęcić was do skorzystania z narzędzia Motion Designer. Jest to darmowa nakładka na TwinCAT 3, która pozwoli idealnie dobrać silnik do danej aplikacji tak, aby w pełni wykorzystać jego potencjał i nie martwić się o ewentualny brak mocy/momentu.
Mam nadzieję, że artykuł pomoże wam w optymalnym tuningu silnika, jednak nie zastąpi on profesjonalnego szkolenia przeprowadzanego przez Beckhoff.
Ocena artykułu zgłoszonego do Konkursu iAutomatyka 4.0 pisz artykuły, zdobywaj punkty, wymieniaj je na nagrody.
Kryterium 1 2 3 4 5 6 7 8 9 10 Punkty (0-2) 2 1 2 2 2 0 2 0 2 2 Suma zdobytych punktów: 15
