





Lewitacja magnetyczna to układ silnie nieliniowy i zaprojektowanie dobrego sterowania dla takiego układu jest bardzo trudne. Głównym celem przy projektowaniu sterowania dla lewitronu jest zaprojektowanie szybkiego oraz precyzyjnego regulatora położenia.
Opis zjawiska lewitacji magnetycznej
Lewitacja magnetyczna to zjawisko fizyczne, które umożliwia unoszenie się ciał bez kontaktu z podłożem. Zjawisko lewitacji magnetycznej pojawia się pod wpływem zrównoważenia siły grawitacji. Jest to możliwe na skutek sił i oddziaływań pola elektromagnetycznego. Unoszące się ciała muszą być wykonane z materiałów, które charakteryzują się silnymi właściwościami ferromagnetycznymi.
Często stosowaną stabilizacją układów lewitacji magnetycznej jest tzw. stabilizacja aktywna. Polega ona na sterowaniu elektromagnesem z wykorzystaniem ujemnego sprzężenia zwrotnego z czujnika położenia. W zależności od położenia obiektu lewitującego i wartości zadanej położenia regulowane jest natężenie prądu, które ma wpływ na pole magnetyczne. Detekcja elementu lewitującego może odbywać się za pomocą czujnika Halla lub czujnika optycznego.
Schemat lewitacji magnetycznej oraz opis matematyczny


Na podstawie powyższego schematu można wyznaczyć opis matematyczny lewitacji magnetycznej, który prezentuje się następująco:


Kilka słów o sterowaniu rozmytym
Logika rozmyta (z ang. fuzzylogic) została rozwinięta w latach sześćdziesiątych dwudziestego wieku przez Lotfi A. Zadeh’a. Celem logiki rozmytej jest przedstawienie funkcji i zasad matematycznych, które byłyby zbliżone do ludzkiego języka. Logika rozmyta w porównaniu do logiki klasycznej różni się tym, że występuje w niej szereg wartości pomiędzy 1 (prawda) i 0 (fałsz). Wnioskowanie systemu rozmytego składa się z czterech modułów:

- Rozmywanie (fuzzification): zmienia ostre wartości (liczbowe) wejścia systemu do wartości rozmytych. Dzieje się to przy wykorzystaniu funkcji przynależności. Podstawowymi funkcjami przynależności są: funkcje trójkątne, funkcje trapezoidalne, funkcje gaussowskie.
- Baza wiedzy: zawiera zbiór reguł IF-THEN przekazanych przez tak zwanych ekspertów, są to informacje dotyczące rozwiązywanego problemu.
- Wnioskowanie: wykorzystuje wartości wejściowe i reguły IF-THEN do wyznaczenia zbioru rozmytego. Zadaniem tego modułu jest symulowanie ludzkiego rozumowania.
- Wyostrzanie (defuzzification): zmieni powstały w procesie wnioskowania zbiór rozmyty na wartości ostre.
Sterowanie lewitacją magnetyczną
Pomimo trzech zmiennych stanów stworzymy dwa regulatory:
- regulator pozycji, który będzie miał strukturę PD+U0 (w dalszej części to jego parametry będą ulegać „rozmyciu”)
- regulator proporcjonalny natężenia prądu – w przypadku lewitacji magnetycznej regulator proporcjonalny o dużym wzmocnieniu jest wystarczający nie ma potrzeby stosowania regulatora PI.
Regulator PD+U0 posiada następującą strukturę

gdzie:
Kp – wzmocnienie,
Td – stała wyprzedzenia,
U0 – stała przyciągania ( jest to maksymalna wartość procentowa napięcia przy którym lewitująca sfera na zadanej wartości nie zostanie przyciągnięta do magnesu).
Pojedyncze regulatory PD+U0 działają prawidłowo dla wartości zadanych, które są stałe i odpowiadają konkretnym nastawom regulatora. W innym przypadku regulator nie będzie w poprawny sposób odwzorowywał wartości zadanej. Problem ten został pokazany poniższym rysunku.

Wartość zadana (sinus) została podana na wejście regulatora PD+U0, który został zaprojektowany dla wartości położenia równej 8mm i tylko w tej pozycji można zaobserwować, że uchyb lewitującego elementu sprowadza się do zera. Wraz ze wzrostem wartości zadanej uchyb się zwiększa. Efekt ten może zostać zniwelowany przez użycie regulatora, którego działanie będzie oparte na płynnej zmianie parametrów tego regulatora dla różnych punktów pracy.
Realizacja systemu rozmytego
Do realizacji sterowania rozmytego użyto systemu Takagi-Sugeno z gaussowskimi funkcjami przynależności, które mówią nam w jakim stopniu zostaną wykorzystane parametry danych regulatorów.

Do odpowiedniego obliczenia nastaw regulatora położenia w zależności od wartości zadanej wykorzystano poniższe równanie:


Jeżeli wybraliśmy funkcje przynależności oraz wybraliśmy sposób w jaki będą obliczane nasze nastawy regulatora dla zmieniającej się wartości zadanej możemy przetestować nasze sterowanie rozmyte w środowisku symulacyjnym.

Zastosowanie logiki rozmytej pozwoliło na zmniejszenie uchybu położenia. Trajektoria nie jest idealnie odzwierciedlona, co możemy zaobserwować na powyższym rysunku. Spowodowane jest to tym, że dla przedziałów położenia (0,008, 0,01) i (0,01, 0,12) system rozmyty oblicza parametry regulatora PD+U0. Dla lepszego odwzorowania wartości zadanej można wyznaczyć parametry regulatora dla położenia 0,009m i 0,011m. Znając zachowanie układu i posiadając parametry regulatora dla pięciu punktów pracy można zastosować sterowanie rozmyte opierające się na pięciu funkcjach przynależności, co powinno skutkować lepszymi rezultatami.
Rzeczywistość i wnioski
Poniższe wykresy przedstawiają przebiegi zarejestrowane podczas pracy rzeczywistego obiektu. Algorytm sterowania nie uległ zmianie. Małej korekcji uległy jedynie nastawy (Kp, Td, U0) regulatorów PD+U0 dla poszczególnych punktów pracy. Spowodowane to było tym, że nigdy nie uda nam się w dokładny sposób zidentyfikować obiektu rzeczywistego. Natomiast czym lepiej to zrobimy to mniejsze zmiany nas czekają przy uruchamianiu naszego algorytmu sterowania z wykorzystaniem rzeczywistego obiektu.
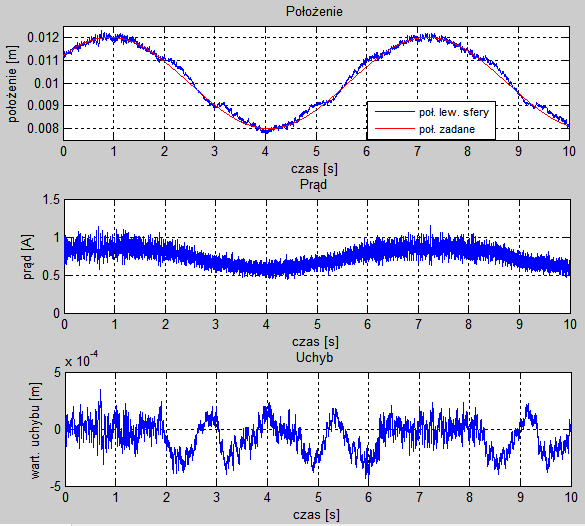
Algorytm sterowania rozmytego działa praktycznie w taki sam sposób jak w warunkach symulacyjnych. Obserwujemy , że wartość zadana jest odwzorowywana poprawnie, a co za tym idzie uchyb jest mały. Nie obserwujemy znacznych przeregulowań. Sygnał z czujnika położenia jest zaszumiony dlatego trajektoria położenia nie jest gładka jak miało to miejsce z wykorzystaniem modelu symulacyjnego, natomiast możemy stwierdzić, że sterowanie jest odporne na zaszumienia i działa prawidłowo w warunkach rzeczywistych. Sterowanie rozmyte jest jednym z prostszych i łatwiejszych w implementacji sterowań nieliniowych i można je spokojnie zaimplementować w sterowniku PLC.
Film
Poniższy film przedstawia sterowanie rozmyte lewitacją magnetyczną, gdzie mamy do czynienia z sygnałem zadanym o charakterze sinusoidy, który w dalszej części jest stały i zmienia się skokowo.