





Na pewno ucieszy Was fakt, że z firmą Panasonic Industry przygotowaliśmy kurs programowania sterowników PLC właśnie z wykorzystaniem programu FPWin Pro. Serdecznie zapraszamy do odebrania darmowego minikursu. Sprawdźcie i zobaczcie, jak nam wyszło i czy spodoba się wam praca ze sterownikami PLC od Panasonic.
Każda osoba programująca dzisiaj sterowniki PLC musiała kiedyś postawić w tej dziedzinie swój pierwszy krok. Część z tych osób miała wyjątkową okazję nauczyć się czegoś konkretnego na studiach, inni uczyli się w pierwszej pracy od doświadczonych kolegów, a jeszcze inni stawiali pierwsze kroki w domowym zaciszu, ucząc się na własną rękę. Jeżeli sam chcesz dołączyć do tej ostatniej grupy i nauczyć się programowania sam, to zapewne zastanawiasz się jak rozpocząć.

Przykładowy sterownik Panasonic FP0H C32EP
Zacznijmy od pytania. Czy aby nauczyć się programować sterowniki, muszę posiadać sterownik PLC? I tak i nie. Zdecydowanie nie jest to umiejętność, której nauczyć się można jedynie czytając książki. Konieczna jest praktyka, samodzielne rozwiązywanie problemów. Jednak nie ma konieczności zakupu od samego początku sterownika. Niektórzy producenci udostępniają w swoich środowiskach programistycznych symulatory rzeczywistych sterowników. Dzięki temu napisany program można przetestować tak, jakby wykonywał go faktyczny sterownik. Symulatory takie przydają się nie tylko do nauki programowania, ale też do testowania poprawności działania programów przez doświadczonych inżynierów. W prawdzie symulatory też mają swoje ograniczenia, ciężko jest zasymulować w idealny sposób sygnały wejść analogowych, czy np. szybkich liczników. Jednak moim zdaniem to od symulatorów powinniśmy zacząć swoją naukę.
W tym artykule przedstawię środowisko do programowania sterowników Panasonic – FPWIN Pro. Pokażę jak skonfigurować nowy projekt, jak poruszać się po środowisku, jak pisać program i na koniec jak go przetestować z wykorzystaniem symulatora.
FPWIN Pro – instalacja i pierwsze wrażenia
FPWIN PRO to narzędzie inżynierskie służące do programowania wszystkich sterowników PLC wyprodukowanych przez Panasonic. Pobrać je można bezpośrednio ze strony Panasonic Electric Works:
Aby pobrać kliknij w przycisk lub link: https://www.panasonic-electric-works.com/pl/control-fpwin-pro.htm

Środowisko w wersji bezpłatnej jest w pełni funkcjonalne, umożliwia programowanie wszystkich sterowników, również komercyjnie, a jedyne ograniczenie dotyczy liczby kroków w programie. Wersja bezpłatna ogranicza program do 10 000 kroków, jednak to wciąż pokaźna liczba. Z pewnością wystarczy na potrzeby naszej nauki, ale bez problemu stworzymy za jej pomocą również aplikacje komercyjne, wykorzystywane przy rzeczywistych liniach produkcyjnych.
Po przejściu na stronę Panasonic Electric Works o FPWIN Pro zjeżdżamy niżej aż do sekcji Product downloads i pobieramy najnowszą wersję Control FPWIN Pro.

Po pobraniu instalujemy aplikację. Instalacja nie jest skomplikowana, więc pominę ten etap. W trakcie instalacji zostanie zainstalowane kilka dodatkowych pakietów systemowych i programowych, na co należy zezwolić.
W pierwszym wrażeniu po uruchomieniu środowiska FPWIN Pro jego wygląd pod względem graficznym może wydawać się staromodny. Jednak nie dajmy się zwieść pozorom. Paradoksalnie to właśnie w tej prostocie i szybkości działania kryją się największe zalety programu. Podobne środowiska, przeładowane funkcjami i z piękną otoczką graficzną mają problemy w płynności działania, nawet na potężnych komputerach. Pomimo tej prostej budowy w FPWIN Pro zrealizujemy każdą aplikację, więc o funkcjonalność nie powinniście się martwić.
Pierwszy projekt i nawigacja w środowisku
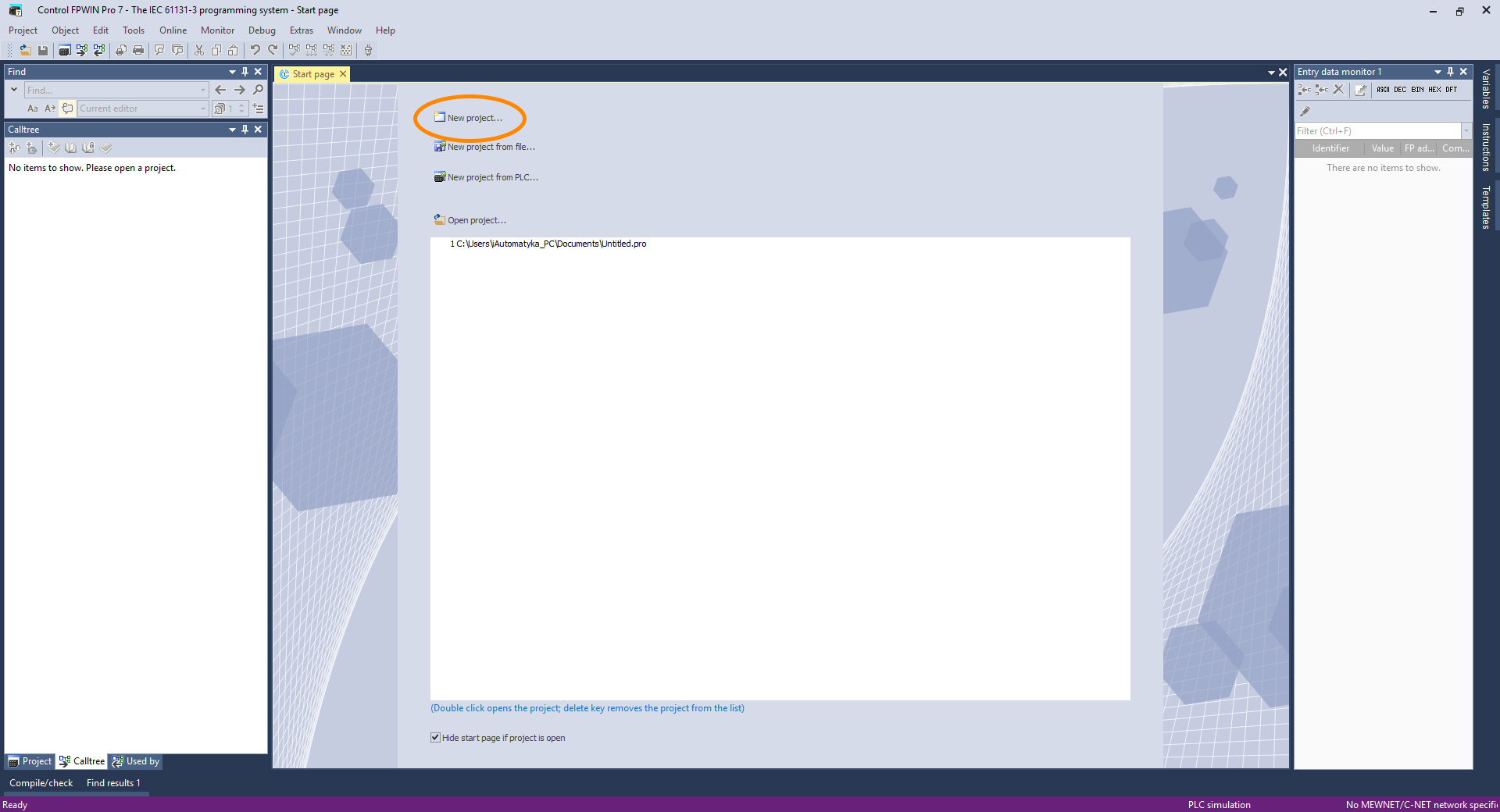
Po uruchomieniu programu pojawi nam się okno startowe. W tym oknie mamy możliwość stworzenia nowego projektu, lub otwarcia już istniejącego. Stwórzmy nowy projekt, klikając w „New project…„.
W kolejnym kroku wyskoczy okno tworzenia projektu. Wybieramy tam model sterownika, z którego będziemy korzystać, nadajemy nazwę programowi oraz wybieramy język programowania. Jeżeli chodzi o model sterownika to na potrzeby tego artykułu wybrać można dowolny model, ponieważ pracować będziemy jedynie z symulatorem. Jeżeli posiadamy fizyczny sterownik należy wybrać w projekcie model sterownika zgodny z tym, który posiadamy. FPWIN Pro obsługuje wszystkie modele sterowników Panasonic. Na tym etapie klikamy „Create Empty project” co zaowocuje stworzeniem projektu bez tworzenia w nim pierwszego programu.

Jeżeli chcesz stworzyć już na tym etapie pierwszy program w swoim projekcie nadaj mu nazwę i wybierz język programowania, a następnie naciśnij „Create project„. Język programu można później zmienić.
Omówienie nawigacji w środowisku rozpocznę od omówienia drzewa projektu. Znajduje się ono w lewym panelu oznaczonym na zdjęciu strzałką. Jeżeli nie widzisz w lewym panelu drzewa projektu, to za pomocą przycisków znajdujących się na dole przełącz na „Project„.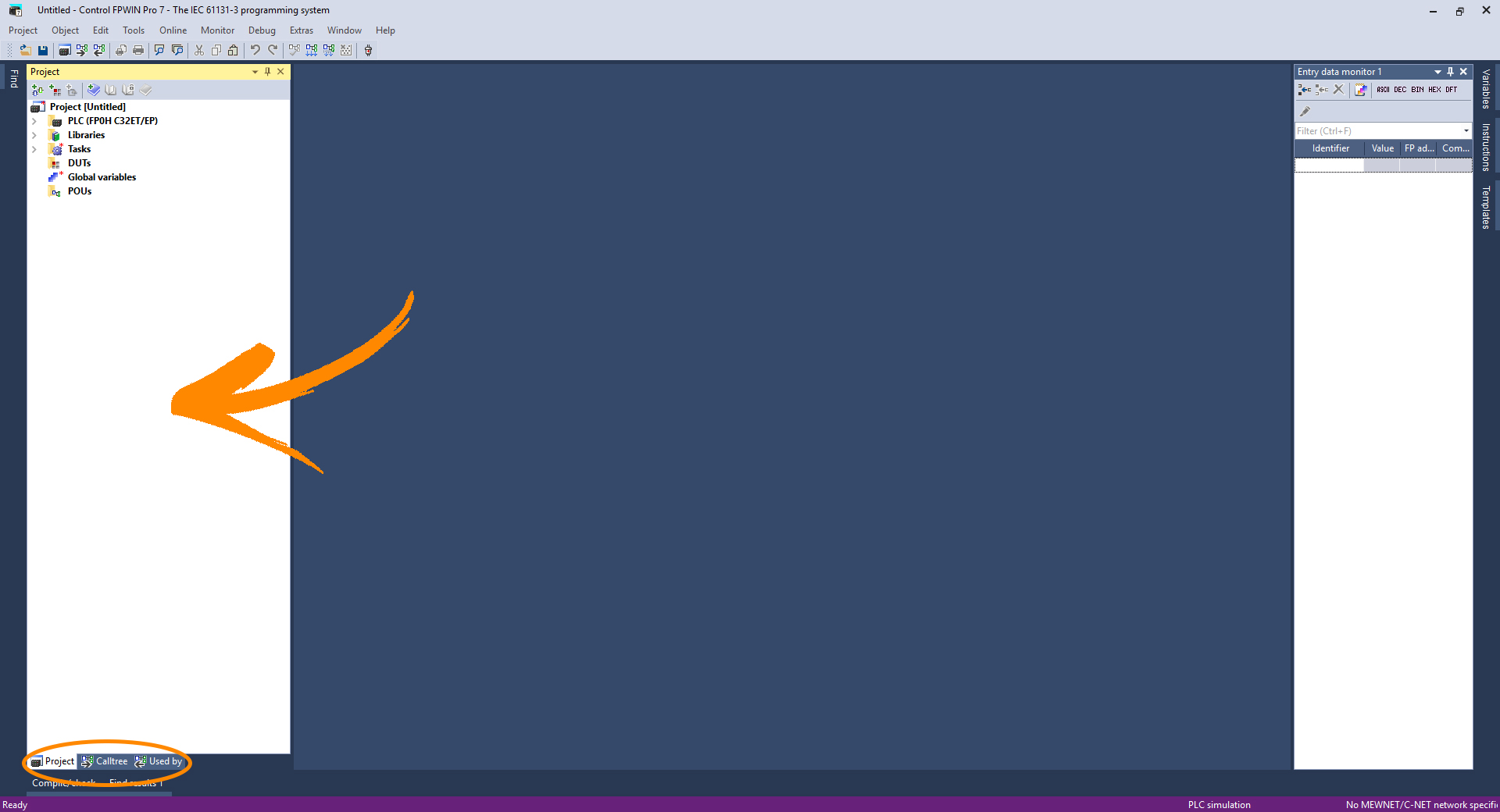
Drzewo projektu
Drzewo projektu moim zdaniem podzielić można na trzy grupy funkcyjne:
- 1 – konfiguracja sterownika,
- 2 – biblioteki gotowych funkcji i programów,
- 3 – zarządzenie programem.

1. Konfiguracja sterownika
Konfiguracja sterownika w wielu aspektach odnosi się do współpracy z fizycznym urządzeniem. Jako, że w tym artykule skupiam się na opisaniu sterowników Panasonic pod względem działania z symulatorem wiele elementów konfiguracji opiszę pokrótce, bez wchodzenia w szczegóły.

- W zakładce „Memory size” można przydzielić pamięć sterownika do programu i danych. Pamięć sterownika jest ograniczona, więc im więcej przeznaczymy na program, tym mniej zostanie nam na przechowywanie danych.

- W zakładce „Hold on/off” deklarujemy obszary pamięci dla przechowywania zmiennych.
- W zakładce „Act on error” określa się w jaki sposób reagować ma sterownik na wystąpienie błędu, np. błędu w konfiguracji sieci.
- W zakładce „Timeout” deklarujemy stałe czasowe dla różnych funkcji np. Watchdoga, czy funkcji komunikacyjnych.
- W zakładce „High-speed counters…” aktywujemy wyjścia impulsowe, szybkie liczniki, wejścia przerwań, wejścia wykrywające impulsy.
- W zakładce „Serial ports” określamy w jaki sposób zachowywać się mają fizyczne porty sterownika, np. z jakiego korzystać protokołu komunikacyjnego.
- W zakładce „Ethernet” konfigurujemy sposób w jaki sterownik komunikuje się z wykorzystaniem portów Ethernet.
- W zakładce „SD card” i poniższych ustawiamy jakie dane mają być logowane na kartę pamięci i z jaką częstotliwością.
2. Biblioteki
Biblioteki to zbiory wszystkich predefiniowanych funkcji, których możemy później używać w programie. Do FPWIN Pro domyślnie dodane są biblioteki systemowe, które określają najczęściej wykorzystywane i najbardziej podstawowe funkcje. Ze strony Panasonic Electric Works można pobrać zestawy gotowych bibliotek, albo można je tworzyć samodzielnie. Jeżeli stworzymy jakąś funkcję, np. do obsługi enkodera i dodamy ją do biblioteki to możemy z tej funkcji korzystać w każdym kolejnym projekcie.

3. Zarządzenie programem
W sekcji zarządzania programem znajdziemy 4 foldery:
- Tasks (zadania),
- DUTs,
- Global variables (zmienne globalne),
- POUs (jednostki programowe).

Zacznijmy opisywanie poszczególnych folderów od końca.
W folderze „POUs” znajdują się pojedyncze programy i podprogramy realizowane przez sterownik. Znajdziemy tutaj też funkcje i bloki funkcji, które możemy później użyć w innym programie.
W „Zmiennych globalnych” definiujemy zmienne, które będą widoczne i będą mogły być używane w każdym stworzonym przez nas programie. Zmienne te muszą być przypisane do konkretnych obszarów w pamięci sterownika, lub do fizycznych wejść i wyjść. Sposób w jaki zmienne są adresowane omówię w dalszej części artykułu.
Folder „DUTs” to folder przeznaczony na tworzenie własnych typów zmiennych. Właściwie odnosi się to do tworzenia tabel danych (DUT – Data Unit Table), ale najczęściej są one wykorzystywane właśnie jako skomplikowane, stworzone na potrzeby danej aplikacji typy zmiennych.
W folderze „Tasks” określane jest to, w jaki sposób działa sterownik. Sterownik działa w pętli, odczytując dane z wejść, wykonując program i wysterowując wyjścia. W POUs dodawane są pojedyncze programy i funkcje, natomiast w Zadaniach określa się, które programy będą wykonywane. Programy zdefiniowane w POUs dodaje się do sekcji Programs. Te programy są wykonywane w „normalnej” pętli działania sterownika. „Interrupt” to przerwanie. Przerwania wykonywane są wtedy kiedy spełniony jest dany warunek. Pisałem o tym wcześniej opisując sekcję „High-speed counters…„. Jeżeli aktywujemy dane przerwanie to po wywołaniu w programie odpowiedniej zmiennej wykonywanie programu zostanie przerwane (stąd pochodzi nazwa przerwanie) i zostanie rozpoczęte wykonywanie programu zapisanego w przerwaniu. „Periodic interrupt” to przerwanie cykliczne wywoływane co określony czas, a nie przez ustawienie zmiennej.
Stwórzmy pierwszy program
Nie będziemy skupiać się tutaj na ustawieniach sterownika, ponieważ pracujemy z symulatorem i nie jest to dla nas istotne. Dodajmy pierwszy program. W tym celu klikamy na POUs prawym przyciskiem myszy i wybieramy „New POU…„

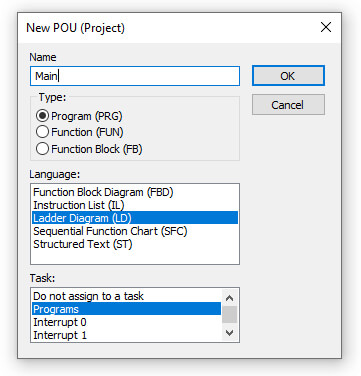
W oknie, które się pojawi nadajemy nazwę programowi, wybieram z listy, że ma być programem (PRG), wybieramy język programowania. Na koniec mamy możliwość dodania programu do któregoś z tasków. Na tym etapie wybieramy Programs, aby program działał w głównej pętli sterownika. Program do pętli można też dodać później.
Po stworzeniu programu uruchommy go. Pojawi nam się poniższe okno.

Czerwonym prostokątem zaznaczono miejsce, gdzie umieścimy nasz kod programu. 1, 2, 3 to kolejne networki. Pomarańczowym prostokątem oznaczono miejsce, w którym deklarujemy zmienne lokalne – używane jedynie wewnątrz tego programu. Prostokątem niebieskim oznaczono podstawowe elementy programu używane w języku LD, takie jak styki, cewki itp. Kolorem zielonym oznaczono prawy panel, w którym możemy przeglądać zaawansowane instrukcje, umieszczone w bibliotekach.
Napiszemy prosty program, w którym po pojawieniu się na wejściu zbocza narastającego będziemy inkrementować wartość pewnej zmiennej. Jeżeli zmienna osiągnie wartość większą niż 10 zostanie uruchomiony licznik czasowy. Po odliczeniu 10 sekund wartość tej zmiennej zostanie wyzerowana. Dodamy też możliwość wyzerowania tej zmiennej przez styk.
Aby dodać do networka styk naciskamy na styk na górnej belce i umieszczamy go w networku. Następnie wpisujemy zmienną, która będzie go aktywować. Jeżeli nie mieliśmy wcześniej zadeklarowanej zmiennej pojawi się okno deklaracji:

Wybieramy tam:
- Location (lokalizację zmiennej):
- Main (zmienna lokalna),
- Project (zmienna globalna),
- Class (klasa):
- VAR (zmienna),
- VAR_CONSTANT (stała),
- VAR_RETAIN (zmienna nieulotna),
- Identifier (nazwa),
- Type (typ zmiennej) – wybór ze wszystkich standardowych typów zdefiniowanych w normie IEC 61131-3,
- Initial (wartość początkowa),
- Comment (komentarz do zmiennej).
Po uzupełnieniu klikamy OK, zmienna zostanie zdefiniowana.

Następnie dodajemy cewkę. Jeżeli klikniemy na cewkę dwukrotnie możemy wybrać sposób jej zachowania. Wybieramy aby reagowała na zbocze narastające (rising edge).

Napiszmy teraz kawałek programu, który będzie inkrementował wartość zmiennej po zarejestrowaniu sygnału na OUT_TMP. Można to zrobić prościej ale wykonajmy to przez blok funkcyjny, aby pokazać jak się je tworzy.
Cofnijmy się więc znowu do POUs i stwórzmy tym razem Function Block (FB). Zaznaczenie Use with EN/ENO spowoduje dodanie wejścia aktywującego do bloku i wyjścia powiadamiającego o jego użyciu.

Po stworzeniu bloku otrzymamy okno takie samo jak w wypadku okna programu. W górnej części zdefiniujemy zmienne.

Zmienną OUT definiujemy jak VAR_IN_OUT czyli zmienną wejściowo-wyjściową z bloku, a jej typ to INT (integer czyli liczba całkowita). W programie tej funkcji będziemy realizowali proste dodawanie: OUT = IN_A + OUT.

Przy próbie przeciągnięcia bloku z drzewa projektu do naszego programu nastąpi konieczność zdefiniowania jego instancji. Właściwie środowisko robi to za nas, możemy zmienić nazwę jeżeli mamy taką potrzebę.

Wywołajmy blok w programie. Do IN_A dodajemy stałą wynoszącą 1, a do OUT, które jest zmienną wyjściową i wejściową zmienną TMP.

Ok. Sprawdźmy teraz, czy nasza inkrementowana wartość jest większa od 10. Znajdźmy w drzewie instrukcji po prawej stronie okna funkcje odpowiedzialne za porównania (comparison instructions) i wybierzmy opcję sprawdzenia, czy wartość jest większa (GT – greather than).

Istnieje możliwość, że przy próbie dodania bloku do programu blok doda się bez wejścia EN i wyjścia ENO. Wtedy należy na liście instrukcji kliknąć prawym przyciskiem myszy na funkcję i wybrać Insert instruction (With EN/ENO).

Dodajmy zatem porównanie do programu i jednocześnie sygnałem wyjściowym aktywujmy zmienną startującą timer.

Czas na dodanie do programu timera. Z listy instrukcji wybierzmy folder Timer instruction, a następnie timer TON (timer on delay), czyli taki, który aktywuje wyjście po upłynięciu określonego czasu. Jeżeli chcemy dowiedzieć się jak obsługiwać taką funkcję zaznaczmy funkcję lewym przyciskiem myszy i naciśnijmy F1 na klawiaturze. Otworzy nam się okno HELPa.
Znajdziemy tam opis całej funkcji, wraz z opisem wejść i wyjść z bloku, ale również przykład zastosowania. I na tym się skupmy.
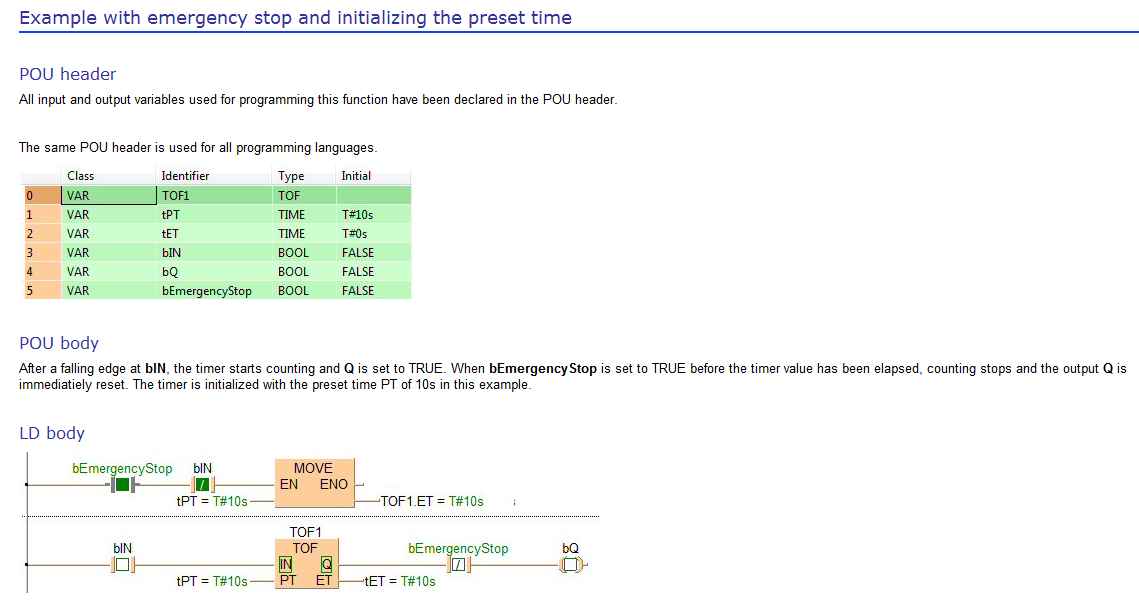
Jak widzimy aby użyć timera należy do wejścia podłączyć sygnał aktywujący, w pole PT wpisać czas, który timer ma odliczać, a do wyjścia Q zmienną, która zostanie aktywowana po odliczeniu czasu. Do wyjścia ET można też dodać zmienną, w której przechowywany będzie czas działania licznika czasowego.

Jeżeli zmienna start_timer przyjmie wartość wysoką to uruchomi timer TON1, ten po upływie 10 sekund wysteruje wyjście i aktywuje zmienna IN2. Sprawmy teraz, aby aktywacja zmiennej IN2 powodowała wyzerowanie stanu TMP. Do tego użyjmy funkcji MOVE, która przeniesie 0 do TMP.

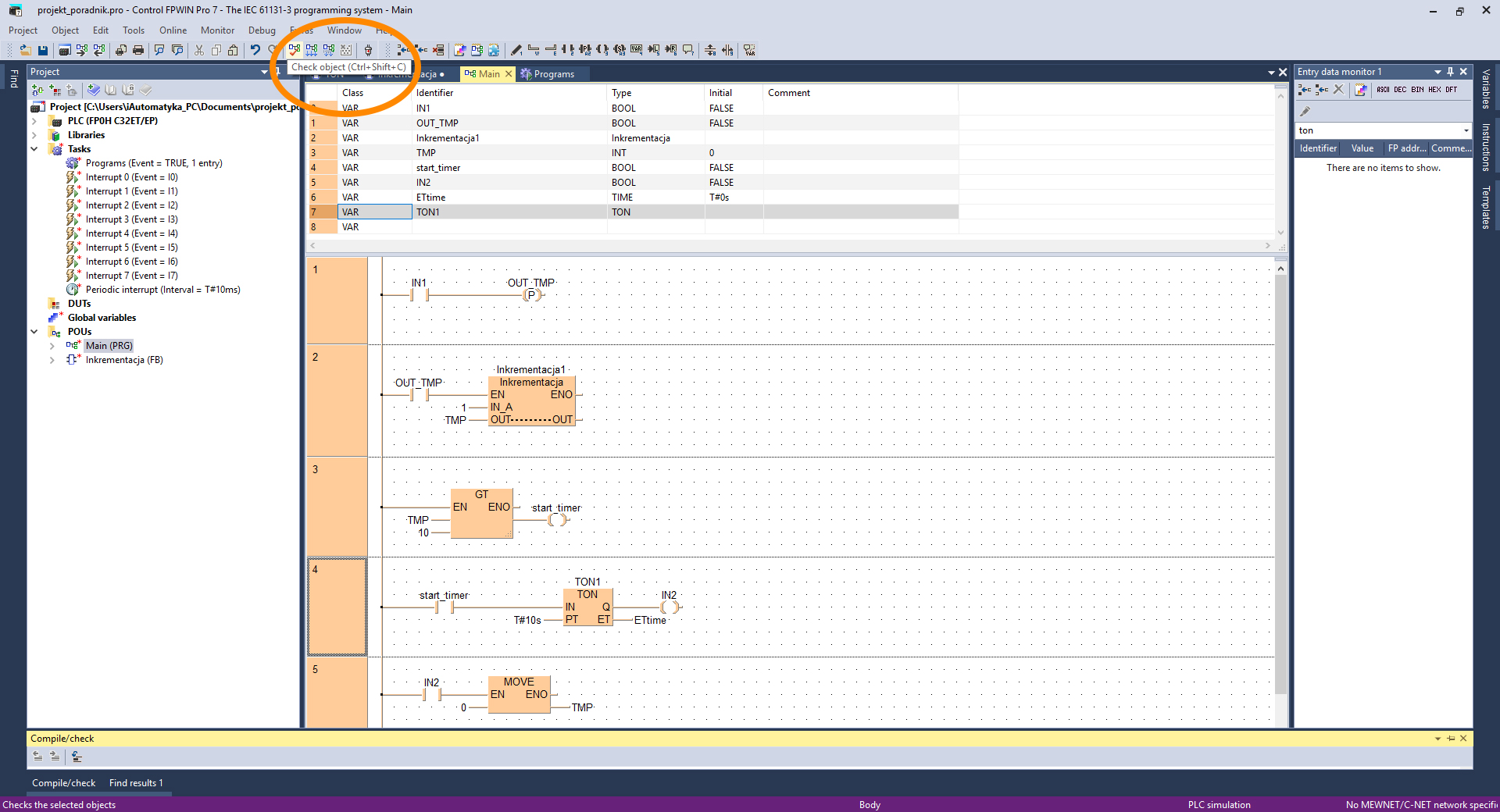
Po napisaniu programu możemy z górnego menu wyszukać opcję Check obecjt, która sprawdzi, czy napisany program nie zawiera błędów. Informacje zostaną wyświetlone w konsoli w dolnej części środowiska programistycznego.
Zmienne globalne
Zanim omówię działanie symulatora i testowanie programu wrócę do opisania zmiennych globalnych, co obiecałem we wcześniejszej części artykułu.
Zmienne globalne to takie zmienne, które są widoczne, odczytywalne i edytowalne z dowolnego elementu projektu. Mogą być też wymieniane z innymi urządzeniami w sieci. W związku z tym zmienne globalne oprócz nadania nazwy i typu muszą posiadać też adres z puli adresów sterownika. Na ogół zmienne w sterownikach każdego producenta adresuje się inaczej. Zobaczmy jak to działa w przypadku sterowników Panasonic i FPWIN Pro.
Po otwarciu Global variables zapewne czeka nas widok pustej tablicy zmiennych. Uzupełnijmy ją.

Zmienne wielobitowe przyporządkowuje się do rejestrów. Pojedynczy rejestr zajmuje w pamięci sterownika 16 bitów. Tak więc zmienne typu integer i word zajmą 16 bitów w pamięci. Dla adresów pamięci całych rejestrów używamy przedrostka DT. I tak rejestr pierwszy określany DT0 to 16 bitów z początku pamięci rejestrów. Zmienne 32 bitowe takie jak real czy double word zajmą dwa kolejne rejestry, przy czym określamy adres tylko pierwszego z nich. Zmienne zajmujące dwa rejestry adresuje się przy użyciu przedrostka DDT (double DT). Warto pamiętać, że używana liczba nie określa numeru bajtu, tylko numer rejestru. Co oznacza, że DT0 to dwa pierwsze bajty, DT1 to dwa kolejne itp.
Jeżeli chodzi o adresowanie pojedynczych bitów korzystamy z zupełnie osobnych rejestrów pamięci. I tutaj przy adresowaniu używamy przedrostka R, który odnosi się właśnie do pamięci flag bitowych. Adres bitu składa się więc z przedrostka, numeru słowa bitowego i numeru bitu w słowie. Przy czym pozycja bitu w słowie określana jest w postaci hexadecymalnej, a numer słowa w postaci dziesiętnej. Zatem adresując bit jako R01 odnosimy się do drugiego bitu w pierwszym słowie, a R0F do szesnastego bitu w pierwszym słowie bitowym.

Istnieje jednak możliwość odnoszenia się do całych słów bitowych, używamy wtedy przedrostka WR. Zatem wpisanie WR10 to odniesienie się do całego jedenastego słowa bitowego, a nie pierwszego bitu w drugim słowie.
Wszystko to jest ważne, jednak jeżeli pracujemy tylko na symulatorze to uzupełnienie adresu zmiennej możemy pozostawić naszemu środowisku. Wtedy pomiędzy różnymi blokami programowymi w projekcie dane wymieniać możemy używając tylko nazwy zmiennych globalnych. Adresy są istotne przy wymianie danych z urządzeniami zewnętrznymi.
Symulator, czyli test programu
Ok. To co zrobiliśmy do tej pory to napisanie „programu”. Można sprawdzić poprawność składni takiego programu, poprawność adresacji zmiennych i używania ich odpowiednich typów. Wszystko fajnie, tylko jak sprawdzić, czy to co napisaliśmy, faktycznie zrealizuje zakładaną funkcję? W tym celu możemy wgrać program do sterownika, wyposażyć go w serię przycisków i diod, albo skorzystać z symulatora sterownika.
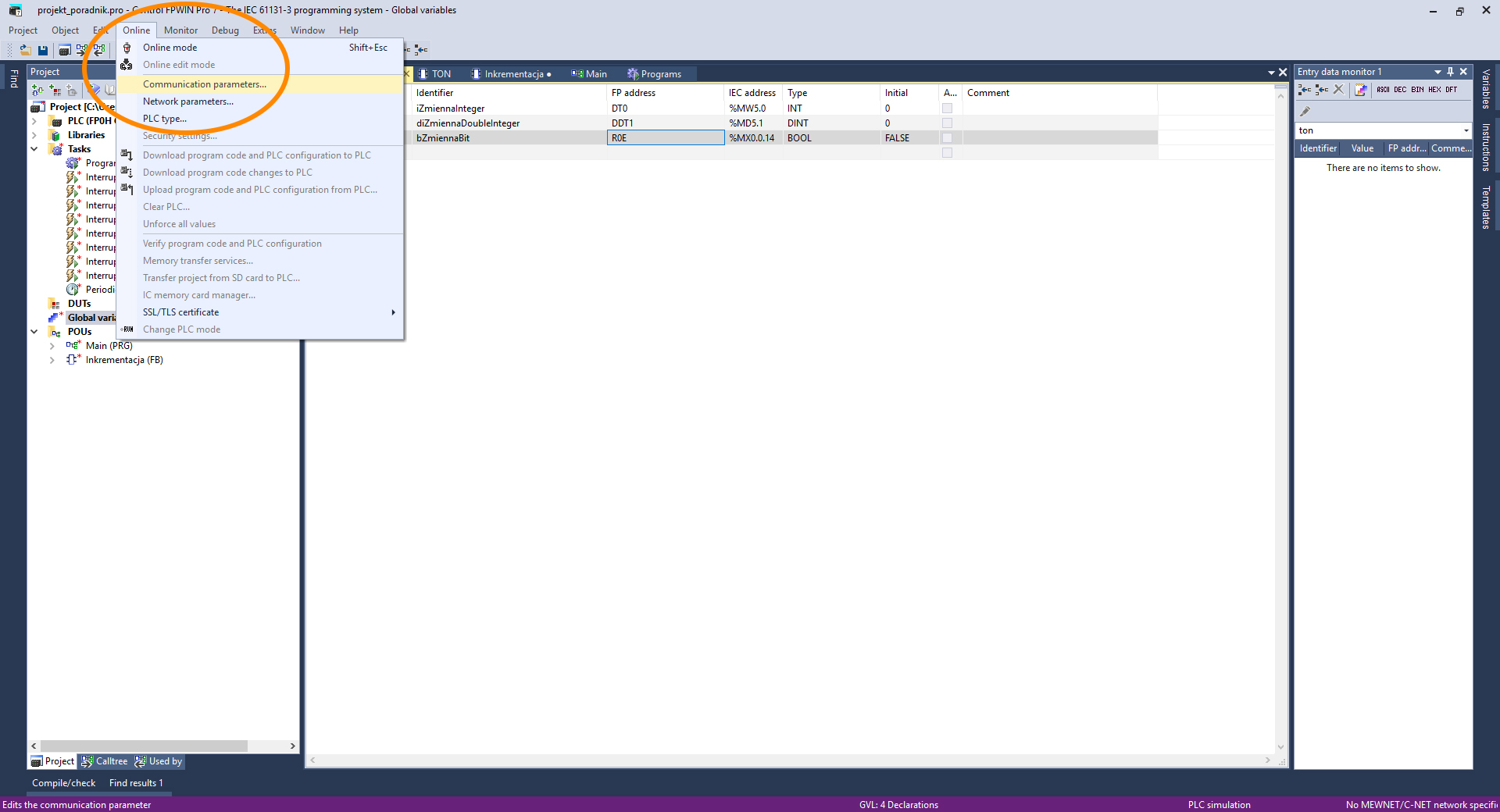
Aby wykorzystać symulator w środowisku FPWIN Pro należy wybrać z górnego menu Online -> Communication parameters…
Następnie z menu wybieramy rodzaj połączenia ze sterownikiem, czyli w naszym wypadku symulację PLC. Klikamy OK.

Środowisko zachowuje się teraz tak, jakbyśmy byli podłączeni do sterownika. Wejdźmy zatem w tryb online, gdzie będziemy mogli podglądać aktualne wartości zmiennych i to w jaki sposób sterownik przetwarza program. Z górnego menu wybieramy Online mode.

Jeżeli od ostatniego wejścia w tryb online zmienialiśmy program, to zostaniemy poinformowani, że jest on nieaktualny. Zatem musimy albo wgrać cały projekt od nowa (Compile all), albo jedynie zmiany (Compile incrementally). Nie ma znaczenia, którą opcję wybierzemy.
Następnie zostaniemy poinformowani, że kod programu i rejestry zmiennych w naszym wirtualnym PLC są inne niż w naszym programie. Dlatego skompilowany program należy wgrać do sterownika, klikając „Download program code and PLC configuration to PLC”.

Teraz możemy obserwować jak działa nasz program i jak zmieniają się stany zmiennych. Zmienne bitowe możemy edytować klikając na nie dwukrotnie. Aby edytować inne zmienne należy dodać je do „Entry data monitor”, czyli tablicy w której możemy edytować wartości zmiennych. Należy kliknąć prawym przyciskiem myszy na zmienną, wybrać „Insert to Entry data monitor”, a zmienna pojawi się w tej tablicy, która pojawi się po prawej stronie ekranu.

Wartości zmiennych zmieniamy po to, aby sprawdzić, czy sterownik zareaguje na zmianę tak, jak oczekiwaliśmy.
Poniżej krótki film z testu napisanego w tym artykule prostego programu. Jak widać działa on zgodnie z założeniami opisanymi na początku artykułu.
Gdzie szukać pomocy? HELP!
Jeżeli w dowolnym miejscu programu masz problem naciśnij F1. Otwarty zostanie HELP, gdzie dana funkcjonalność jest opisana. W przypadku funckji najczęściej zawarty jest również przykład, a czasem można go nawet skopiować do programu jednym kliknięciem.

Co dalej?
Rolą tego artykułu było pokazanie działania środowiska FPWIN Pro, tego jak zbudować w nim prosty program oraz jak przetestować jego działanie za pomocą symulatora. Najważniejsze już wiesz. Jeżeli chcesz zacząć naukę programowania z tym środowiskiem, to polecam znalezienie w sieci przykładowych programów na sterowniki PLC, przepisanie ich do FPWIN Pro oraz naukę na podstawie „wstecznej inżynierii” oraz podglądania działania na symulatorze. Kilka przykładowych programów znajdziesz w książce „Programowanie sterowników PLC zgodnie z normą IEC61131-3 w praktyce” Sławomira Kacprzaka, która powstała w oparciu o sterowniki PLC Panasonic. Kolejnym krokiem może być próba samodzielnej realizacji znalezionych w sieci zadań. Pamiętaj, najważniejsze to zacząć faktycznie się uczyć i tworzyć programy, a nie tylko o tej nauce czytać.
Artykuł powstał przy wsparciu technicznym Daniela Leszczewicza – pracownika Panasonic Electric Works Polska.

