





Artykuł z serii: Kurs regulacji PID - Wirtualne Laboratorium
Rozdz. 11.1 Wstęp

Rys. 11-1
Człon oscylacyjny i poznany wcześniej człon dwuinercyjny są przykładami transmitancji G(s) w której licznik jest liczbą stałą d, a mianownik dwumianem drugiego stopnia o parametrach a, b, c–>Rys. 11-1a.
Na Rys. 11-1b parametry a,b,c,d mają konkretne wartości 8,2,2,4.
Z postaci ogólnej Rys. 11-1 nie widać wyraźnie, czy jest to jest to człon dwuinercyjny czy oscylacyjny.
Dlatego należy G(s) z Rys. 11-1a przekształcić do postaci znormalizowanej

Rys. 11-2
Człon oscylacyjny-postać znormalizowana.
A w niej:
k – wzmocnienie w stanie ustalonym
q – współczynnik tłumienia-im większy tym silniejsze tłumienie oscylacji
T – współczynnik okresu oscylacji. Podkreślam tylko. Współczynnik T, nie sam okres oscylacji Tosc.
Teoretyczny okres oscylacji obliczymy wg wzoru Tosc=2*Π*T. W dodatku jest to wzór przybliżony. Prawdziwy okres oscylacji na wykresie będzie dokładny tylko dla tłumienia q=0. Tłumienie q zwiększa ten okres.
Znormalizowane G(s) cudaczne trochę, ale wszystko będzie jasne po zbadaniu konkretnej transmitancji G(s) z Rys. 11-1b.
Na początek sprowadźmy ją do postaci znormalizowanej, czyli takiej jak na Rys. 11-2.

Rys. 11-3
A jak to zrobić?
1 Podziel licznik i mianownik przez 2, tak by w mianowniku wyraz wolny (czyli bez s) stał się 1
2 … itd
Oczywiście L=P i sprawdź to.
W ten sposób otrzymamy po prawej stronie postać znormalizowaną. Wynika z niej, że k=2, T=2 sek (czyli Tosc=2*Π*T=12.56 sek) i q=0.25. W następnych punktach będziemy badać tę transmitancję i jej modyfikacje przy różnych tłumieniach q.
Uwaga
Z wartości współczynnika tłumienia q wynika:
q=0–> idealny człon oscylacyjny – bez tłumienia –>Rozdz. 11.5
0<q<1 rzeczywisty człon oscylacyjny – z tłumieniem–>Rozdz. 11.2 , 11.3 ,11.4 , 11.6
q>=1 człon dwuinercyjny–>Rozdz. 11.7
Czas na laboratorium!
Rozdz. 11.2 k=2 T=2 sek q=0.25 z suwakiem i bargrafem
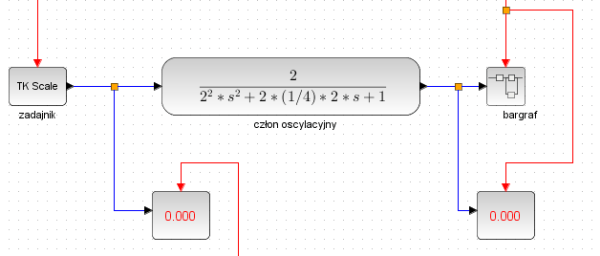
Zaczynamy od suwaka i bargrafu. Co prawda trudno jest odczytać parametry oscylacji obserwując bargraf, za to poczujesz ten ciężarek na sprężynie. Przyda się na zabawie w remizie.
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_człon_oscylacyjny/01_oscylacyjny_bargraf.zcos.
Rys. 11-4
Wciśnij „Start”

Rys. 11-5
Pobaw się tym ciężarkiem. Proponuję dać wymuszenie skokowe suwakiem na ok. +0.4. Zobaczysz oscylacje. Poczekaj trochę, aż się uspokoi i oblicz wzmocnienie k używając w stanie ustalonym mierników cyfrowych. Powinno być k=2. Z parametrami T i q na razie dajmy sobie spokój. Wrócimy do nich używając oscyloskopu.
Rozdz. 11.3 k=2 T=2 sek q=0.25 ze skokiem i oscyloskopem
Jaki będzie prawdziwy okres oscylacji Tosc z wykresu w porównaniu do teoretycznego Tosc=12.56 sek obliczonego obliczonego pod Rys. 11-3?
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_człon_oscylacyjny/02_oscylacyjny_skok_oscyloskop.zcos

Rys. 11-6
Wciśnij „Start”

Rys. 11-7
Wzmocnienie k=2 idealnie zgadza się z teorią.
Prawdziwy okres oscylacji Tosc=13 sek na oscyloskopie jest trochę większy od teoretycznego Tosc=12.56 sek .
A tłumienie q? Też można obliczyć ten parametr z wykresu, ale darujmy sobie. Wystarczy nam wiedza, że q zwiększa Tosc oraz powoduje szybsze zanikanie drgań. Przekonamy się o tym w następnych doświadczeniach.
Rozdz. 11.4 k=2 T=2 sek q=0.125 ze skokiem i oscyloskopem
Jak dwukrotne zmniejszenie tłumienia do q=0.125 wpłynie na przebiegi?
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_człon_oscylacyjny/03_oscylacyjny_skok_oscyloskop.zco

Rys. 11-8
Wciśnij „Start”

Rys. 11-9
Oscylacje trwają dłużej. i nawet nie zdążyły się uspokoić do 60 sekundy.
Okres oscylacji zmniejszył się do Tosc=12.9 sek ale nadal jest większy od idealnego Tosc=12.56 sek.
Wzmocnienie k=2 jest oczywiste. Zwiększyła się także pierwsza amplituda.
A gdyby tak całkowicie pozbyć się tłumienia dając q=0?
Rozdz. 11.5 Idealny człon oscylacyjny k=2 T=2 sek q=0 ze skokiem i oscyloskopem
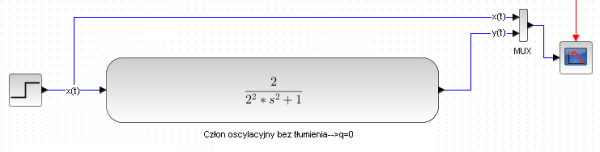
Jak brak tłumienia, czyli q=0 wpłynie na przebiegi?
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_człon_oscylacyjny/04_oscylacyjny_skok_oscyloskop.zcos
Rys. 11-10
Wciśnij „Start”

Rys. 11-11
Co jest grane? Nie ma stanu ustalonego y(t)=2. Zamiast niego jest składowa stała 2 wokół której „lata” sinusoida o amplitudzie też 2.
I tak to będzie do końca świata. Zauważ że prawdziwe Tosc=12.56 sek z wykresu i jest równe teoretycznemu. Jest to cecha idealnego członu oscylacyjnego.
Do tej pory zmniejszaliśmy tłumienie, aż doszliśmy do idealnego oscylacyjnego gdzie q=0. To pójdźmy teraz w drugą stronę z tłumieniem i zwiększmy je na q=0.5.
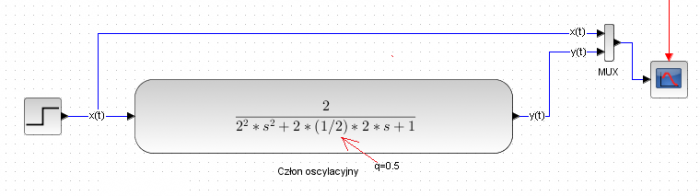
Rozdz. 11.6 k=2 T=2 sek q=0.5 ze skokiem i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_człon_oscylacyjny/05_oscylacyjny_skok_oscyloskop.zcos
Rys. 11-12
Wciśnij „Start”

Rys. 11-13
Odpowiedź y(t) tak jakby zbliżyła się do dwuinercyjnej, chociaż jest to jeszcze człon oscylacyjny. Amplituda zmalała i Tosc=14.8 sek wzrosło. Najbardziej odbiega teraz od teoretycznego 12.56 sek. Idźmy więc na całość i dajmy q>1 np q=1.5.
Rozdz. 11.7 Człon „Oscylacyjny” k=2 T=2 sek q=1.5 ze skokiem i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/06_dwuinercyjny_skok_oscyloskop.zcos
Nazwa „Oscylacyjny” w cudzysłowie i dwuinercyjny w nazwie pliku coś sugerują. Za chwilę się wyjaśni.

Rys. 11-14
Wciśnij „Start”

Rys. 11-15
No właśnie. Typowa odpowiedź członu dwuinercyjnego. Okazuje się, że dla q>1 człon oscylacyjny staje się dwuinercyjnym!. Stąd też cudzysłów w tytule p.11.7. Skoro jest to dwuinercyjny to da się sprowadzić transmitancję z Rys. 11-14 do postaci z Rys. 10-1 z poprzedniego rozdziału.
Rozdz. 11.8 k=2 T=2 sek q=0.25 z dirakiem i oscyloskopem
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/07_oscylacyjny_dirac_oscyloskop.zcos

Rys. 11-16
Wciśnij „Start”
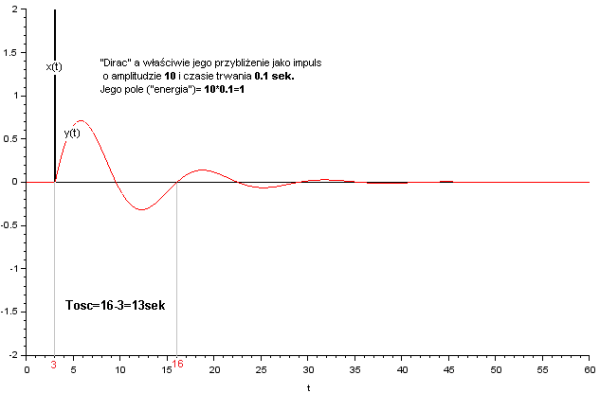
Rys. 11-17
Dirac pokazuje to, co najciekawsze w członie oscylacyjnym– tylko składową zmienną. Tosc=13 sek jest takie samo jak na Rys. 11-7. Wzmocnienie k jest już trudniejsze do obliczenia, acz możliwe.
Rozdz. 11.9 Cztery naraz z dirakiem i oscyloskopem
Jako posumowanie damy jednoczesny impuls diraka na 4 człony dynamiczne z różnymi tłumieniami q. Wszystkie mają T=0.5 sek i k=1 Jako x(t) wybraliśmy diraka. Wtedy odpowiedź nie ma składowej stałej i łatwiej jest zaobserwować wpływ tłumienia q na przebiegi czasowe.
Wywołaj Pulpit/PID/01_podstawowe_człony_dynamiczne/08_4_na_raz _z_dirakiem_oscyloskop.zcos

Rys. 11-18
Wciśnij „Start”

Rys. 11-19
Widać wyraźny wpływ tłumienia q. Im większe tłumienie, tym mniejsze skłonność do oscylacji. Dla największego q=1.2 nie już nawet oscylacji. człon oscylacyjny stał się dwuinercyjnym
Rozdz. 11.10 Wnioski
1. Transmitancja członu oscylacyjnego dla 0 <q<1 przedstawia Rys. 11-2.
2. Dla q=0 jest to człon oscylacyjny idealny w którym drgania nigdy nie gasną.
3. Ze wzrostem tłumienia q maleją oscylacje. Zwiększa się także okres oscylacji Tosc.
4. Dla q>=1 mamy do czynienia z członem dwuinercyjnym. Wtedy mianownik G(s) można przedstawić tak jak na Rys. 10-1 w poprzednim rozdziale.
O transmitancji członu oscylacyjnego i dwuinercyjnego można też powiedzieć inaczej

Rys. 11-20
To samo można wyrazić używając tzw. liczb zespolonych

Rys. 11-21
Znajomość liczb zespolonych nie jest konieczna, ale temat będzie jeszcze poruszony.
