





Artykuł z serii: Kurs regulacji PID - Wirtualne Laboratorium
Rozdz. 16.1 Wstęp
Są całki nieoznaczone i oznaczone.
Rozdz. 16.2 Całka nieoznaczona F(t) z funkcji f(t)
Całka nieoznaczona z funkcji f(t) jest tzw. funkcją pierwotną F(t) i często nazywa się po prostu całką.

Rys. 16-1
Pochodną funkcji pierwotnej F(t) jest sama funkcja f(t) i odwrotnie – całką nieoznaczoną z funkcji f(t) jest funkcją pierwotną F(t).

Rys. 16-2
Całkowanie i Różniczkowanie są działaniami wzajemnie odwrotnymi. Całkowanie jako obliczanie funkcji pierwotnej F(t) jest pewną biegłością, którą nabierają studenci pierwszego roku politechnik i inne niehumany. Potrzebna jest do obliczania tzw. całek oznaczonych. Będą one omówione za chwilę. Zwykle na wyższych latach pamięta się tylko najprostsze całki inaczej funkcje pierwotne . Jest to słuszne podejście, bo zawsze można wrócić do notatek z wykładów.
W krótkich żołnierskich słowach. Funkcja pierwotna z pochodnej funkcji jest właśnie tą funkcją (Rys. 16-2c).
Rozdz. 16.3 Całka oznaczona z funkcji x(t)
Rozdz. 16.3.1 Wstęp
W automatyce mamy bardziej do czynienia z całką oznaczoną niż nieoznaczoną. Ta ostatnia jako funkcja pierwotna służy do bardzo łatwego obliczania wartości całki oznaczonej.
Rozdz. 16.3.2 Całka oznaczona z funkcji x(t) jako pole pod funkcją x(t)

Rys. 16-3
Całka oznaczoną od t1 do t2 jest pole S pod funkcją x(t). Jest to więc konkretna liczba np. S=27.13. Dla naszych potrzeb nieco zawęzimy tę definicję. W automatyce zwykle coś zaczyna się w czasie t=0 i trwa do czasu t. Np. sygnał wejściowy x(t) może być skokiem jednostkowym albo piłą. Przyjmuje się więc, że że dla t<0 (ujemnego!) sygnał x(t)=0.–>Rys. 16-3.
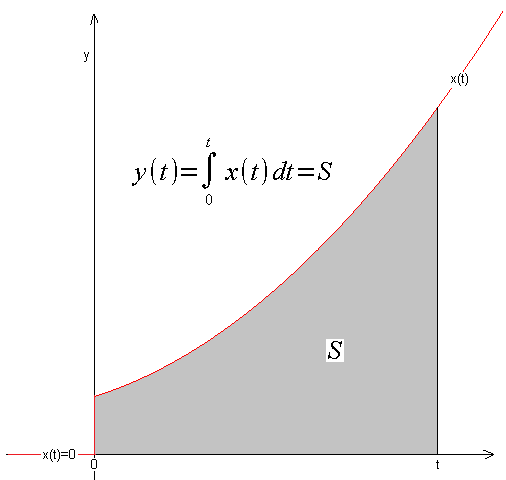
Rys. 16-4
Jest to więc wersja z Rys. 16-3 której t1=0 i t2=t. Przy takim podejściu całka oznaczona staje się funkcją y(t) a nie konkretną liczbą.
A teraz najważniejsze. Jak obliczamy pola na Rys. 16-3 i Rys. 16-4. A no tak.

Rys. 16-5
F(t1) i F(t2) na Rys. 16-5a to wartości funkcji pierwotnych, czyli całek nieoznaczonych dla t1 i t2.
Samo F(t1) możemy traktować też jako pole na lewo od t1 i analogicznie F(t2) jako pole na lewo od t2. Przy takim podejściu wzór z Rys. 16-5a jako różnica pól jest oczywisty.
A na Rys. 16-5b już samo F(t) jest po prostu funkcją pierwotną! W następnych 2 doświadczeniach sprawdzimy czy tak jest. Czy teoria zgadza się z praktyką?
Rozdz. 16.3.3 Całka oznaczona z funkcji która jest skokiem jednostkowym x(t)=1
Dlaczego akurat skok jednostkowy x(t)=1? Bo już nie ma prostszej funkcji i łatwo z niej wyliczyć całkę oznaczoną = pole S.
Potraktujmy całkę oznaczoną z x(t) jako wyjście y(t) członu całkującego którego wejściem jest x(t).
Wywołaj Pulpit/PID/03_calka/01_calka_ze_skoku_jednostkowego.zcos

Rys. 16-6
Wejściem członu całkującego jest skok jednostkowy x(t)=1 a jego wyjściem y(t) jest całka oznaczona od 0 do t z x(t).
Wciśnij „Start”

Rys. 16-7
Całka oznaczona od 0 do t dowolnej funkcji, jest polem pod wykresem tej funkcji.
Tu x(t)=1 jest bardzo proste i łatwo liczy się pole pod funkcją jako pole prostokąta. Dla dowolnego t pole y(t)=1*t=t.
Np. dla t=5 y(t)=5. Czyli teoria zgadza się z praktyką.

Rys. 16-8
Na Rys. 16-8a Wyjście y(t)=t jest całką oznaczoną z wejścia x(t)=1 i wejście x(t) jest pochodną z wyjścia y(t). Jest tu pewna analogia do „kółka” z Rys. 16-2a. Dlaczego nie całkowita analogia?
Bo:
– x(t)=0 dla t<0 i x(t)=1 dla t>0 a nie dla każdego t jak w analizie matematycznej.
– tu całka oznaczona z x(t) a na Rys. 16-2a całka nieoznaczona
Rys. 16-8b jest uogólnieniem Rys. 16-8a.
Tu f(t) jest dowolną funkcją zamiast y(t)=t która była piłą.
Dowolną ale nie do końca, bo f(t)=0 dla t<0.
Wyraźnie za to widać, że całkowanie oznaczone dla funkcji f(t) spełniajacej warunek:
f(t)=0 dla t<0
jest odwrotne do różniczkowania i vice versa.
Rys. 16-8c mówi to samo Całka oznaczona z pochodnej funkcji jest ponownie tą funkcją.
Rozdz. 16.3.4 Całka oznaczona z funkcji która jest piłą x(t)=0.2*t
Dla piły da się wyliczyć całkę oznaczoną jako pole trójkąta. Sprawdzimy więc, czy wyjście z członu całkującego jest całką oznaczoną.
Wywołaj Pulpit/PID/03_calka/02_calka_z_pily.zcos

Rys. 16-9
Wejściem członu całkującego jest „piła”, inaczej sygnał narastający liniowo, tu wg wzoru x(t)=0.2*t.
Wciśnij „Start”

Rys. 16-10
Całkę oznaczoną z x(t) obliczymy jako pole trójkąta o podstawie t i wysokości x(t)=0.2*t tak jak na rysunku.
Teoria zgadza się z praktyką. Sygnał za członem całkującym jest parabolą o podanym wzorze i dla np. t=8 sygnał wyjściowy y(t)=6.4.
Rozdz. 16.3.5 Całka oznaczona z funkcji x(t)=”machanie suwakiem”
Całka oznaczona jest zawsze polem pod funkcją od czasu t=0 do czasu t.
Nawet gdy funkcja jest bardziej skomplikowana tak jak poniżej. Całka może być dodatnia, zerowa lub ujemna.
Wywołaj Pulpit/PID/03_calka/03_calka_suwak_oscyloskop.zcos

Rys. 16-11
Funkcję x(t) będziesz zadawał ręcznie. Miernik cyfrowy przeznaczony jest do dokładnego wyznaczenia wartości x(t)=0
Wciśnij „Start”

Rys. 16-12
Delikatnie steruj suwakiem tak, żeby x(t) przez pewien było:
– x(t)=+0.025
– x(t)=+0.05
– x(t)=+0.025
– x(t)=0
– x(t)=-0.025
– x(t)=-0.05
– x(t)=-0.025
– x(t)=0
– ….itd
W/w charakterystyczne wartości x(t) pokazane są na suwaku.
Zauważysz że:
– im większa wartość dodatnia x(t) tym szybciej rośnie y(t)
– im większa wartość ujemna x(t) tym szybciej maleje y(t)
– zerowe x(t) powoduje, że y(t) jest stałe
To utwierdza nas w przekonaniu, że x(t)=y'(t). Mówiąc nieprecyzyjnie za to trafnie „x(t) jest pochodną całki” lub „kólka z Rys. 16-8 są prawdziwe”.
W moim doświadczeniu 52 sekundzie gdy y(t)=0 wtedy pole dodatnie x(t) równe jest polu ujemnemu (pole liczone do t=52 sek.)
U Ciebie może być inaczej.
Rozdz. 16.4 Podsumowanie

Rys. 16-13
Symbole członu całkującego

Rys. 16-14
Wyjście y(t) jest całką wejścia x(t) lub Wejście x(t) jest pochodną wyjścia y(t).
