




Dzień dobry! W ostatniej części poradnika przyjrzymy się funkcjom logicznym możliwym do implementacji w systemach wizyjnych Keyence IV. Oprogramowanie IV-Navigator umożliwia konfigurację inspekcji w formie bramek logicznych AND i OR wraz z negacją określonych wejść (np. wynik = insp1 AND NOT insp2). Domyślnie wszystkie narzędzia inspekcyjne ustawione są jako AND nawet bez ręcznej konfiguracji. Brak pozytywnego wyniku jednego z narzędzi powoduje ustawienie wyniku procesu jako negatywny.
Zapraszam również do pozostałych części naszego poradnika:
Część 0. Stanowisko wizyjne Keyence
Część 1. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
Część 2. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
Część 3. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
Poniżej przedstawię przykłady – inspekcja szpilki z czarnym łebkiem oraz spinacz biurowy.
Przykład 1
Główka oraz połowa długości szpilki posłuży nam jako Position Adjustment – na tej podstawie obecność szpilki jest określana w ogóle. Dodane zostały dwa narzędzia inspekcyjne – Outline dla wykrywania prostych krawędzi szpilki oraz Area – dla wykrywania obecności łebka w kolorze czarnym.

Obok czarnej szpilki podstawiono szpilkę z łebkiem białym. Narzędzie Area nie wykryło minimalnej ilości pikseli czarnych. Jedno z dwóch (trzech) narzędzi inspekcyjnych daje wynik negatywny, więc cała inspekcja przebiega negatywnie.

Przykład 2
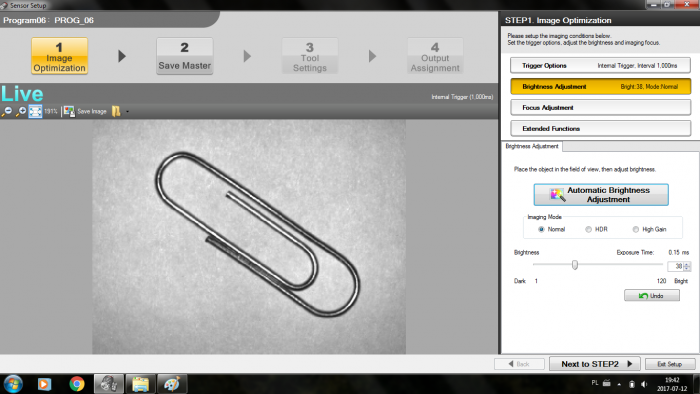
W drugim przykładzie przyjrzymy się bliżej popularnemu spinaczowi, a także jego otoczeniu.


W tym przypadku zaimplementowano Position Adjustment (cały spinacz), Outline (wewnętrzna część) oraz Area po obu dłuższych bokach. Narzędzia Area wykrywają tylko białe piksele – pojawienie się obcego obiektu w tych miejscach da negatywny wynik inspekcji.


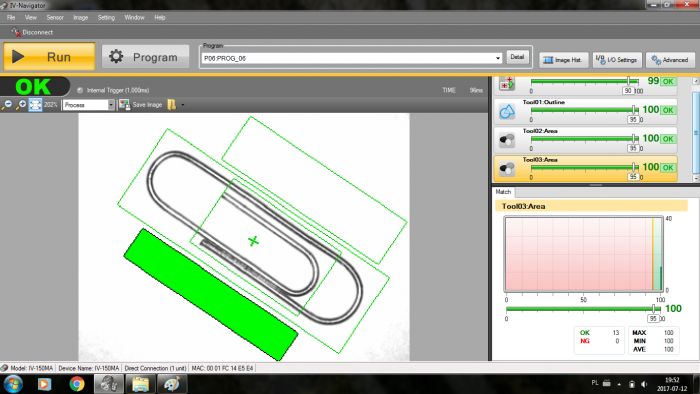
W takiej, nienaruszonej sytuacji wynik całości jest więc pozytywny.

Odegnijmy lekko jeden koniec spinacza. Jest on nadal wykrywany, lecz kamera już wykrywa nieprawidłowość w postaci zakłócenia jednego z narzędzi Area oraz Outline – ucieczka jednego z końców spowodowała ubytek ciemniejszych pikseli (krawędzi) w części środkowej spinacza. Wynik całości już jest negatywny.




I to tyle?
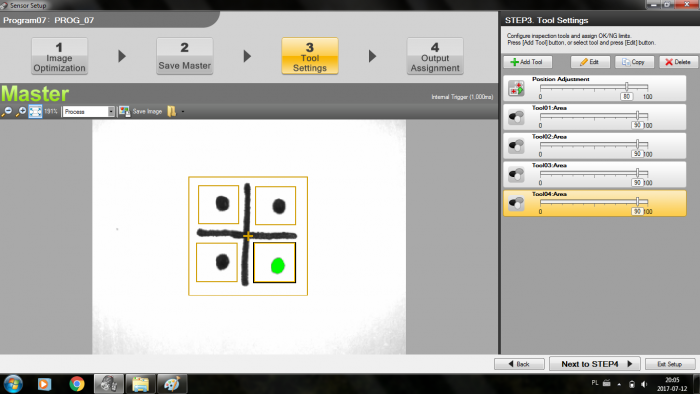
W tych dwóch przykładach możemy zaobserwować domyślny układ AND, nie dokonywaliśmy jednak żadnej konfiguracji funkcji logicznych. W następnych przykładach zastosujemy bardzie konkretne konfiguracje. Dla zwiększenia przejrzystości będą to przykłady syntetyczne – układy kropek i kresek na kartce papieru. Wszystkie przykłady będą podobne – czarny krzyż będzie pełnił rolę Position Adjustment. Narzędzia inspekcyjne będą ustawiane na czarnych kropkach. Używać będziemy tylko funkcji Area (czarne piksele).
Przykład 3 – AND

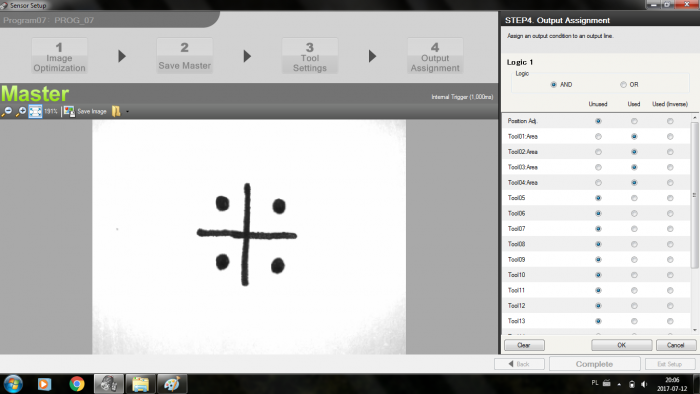
Dochodząc do menu konfigurowania opcji logicznych wybieramy Logic 1:

Wszystkie cztery narzędzia połączone zostaną w AND. Aby wynik całości był pozytywny, zakładamy, że wyniki poszczególnych narzędzi również będą pozytywne.

Z menu po prawej stronie zaznaczamy interesujące nas narzędzia – Used. Used (inverse) oznacza odwrócenie (NOT) logiczne, czym zajmiemy się później.
Po zakończeniu konfiguracji przechodzimy do testów.

Zasłońmy jedną z kropek – wynik inspekcji przechodzi na negatywny.

Przykład 4 – OR
Przykład jest identyczny jak poprzednio, wszystkie pomniejsze inspekcje łączymy tym razem w bramkę OR.


Testy przebiegają pomyślnie – dla pozytywnego wyniku całej inspekcji wystarczy pozytywny wynik przynajmniej jednego z narzędzi – założenia bramki OR zostają spełnione.
Przykład 5 – AND z zanegowanym wejściem
Przykład identyczny jak trzeci z jedną różnicą – wynik inspekcji kropki zaznaczonej strzałką musi być negatywny.

Musimy znać numer narzędzia, które wykluczymy na kolejnym etapie.

W menu konfiguracji logiki zaznaczamy je jako Used (inverse).
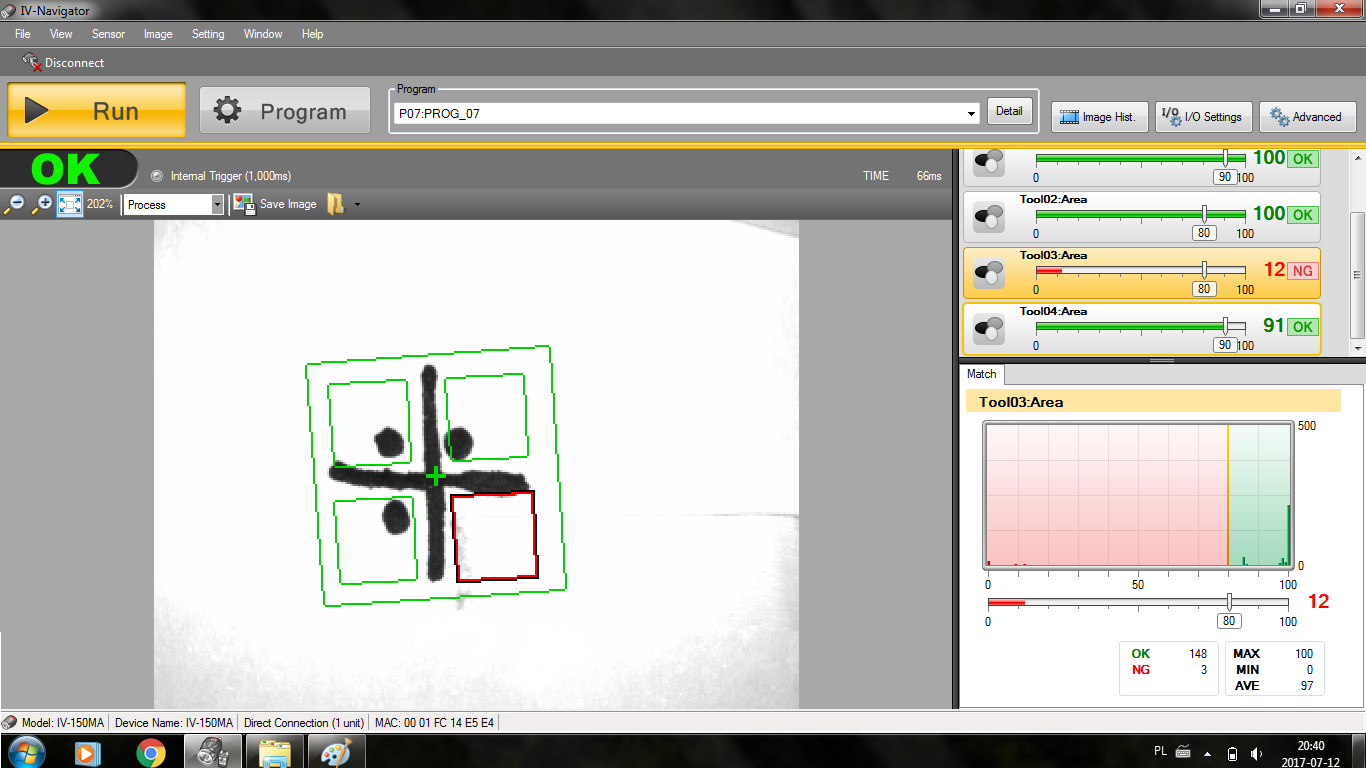
Zasłaniamy kropkę zaznaczoną iksem:

Ups, nie ta kropka.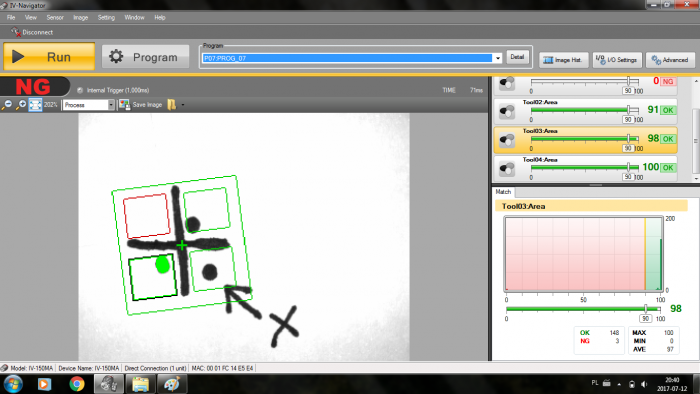
Teraz prawidłowo – inspekcja dwóch górnych i lewej dolnej kropki muszą musi przebiec pozytywnie AND inspekcja dolnej prawej negatywnie – wynik całego procesu inspekcji pozostaje pozytywny. Na poprzednim zdjęciu pomyliłem kropki – wynik inspekcji jest negatywny. Zaimplementowana logika spełnia więc swoje zadanie.
Bardzo krótkie podsumowanie
W kamerach Keyence IV możemy zaimplementować jedną bramkę logiczną – działania logiczne nie będą więc tak imponujące jak w sterownikach PLC. Mimo wszystko opcja ta ubogaca naszą kamerę o dodatkowe możliwości, a przez to również o nowe obszary zastosowania. Musimy ponadto pamiętać, że wszystkie części tego poradnika przygotowywane były na kamerze IV-150MA – jest to model o krótkim zasięgu i monochromatycznej matrycy. Zastosowanie wyższego modelu, np. IV-500CA zwiększa możliwości i dodaje nowe narzędzia inspekcyjne.
Na koniec wrzucam kilka innych obrazów z kamery:
Folia bąbelkowa. Nie sposób odróżnić bąbelki pełne od pękniętych.

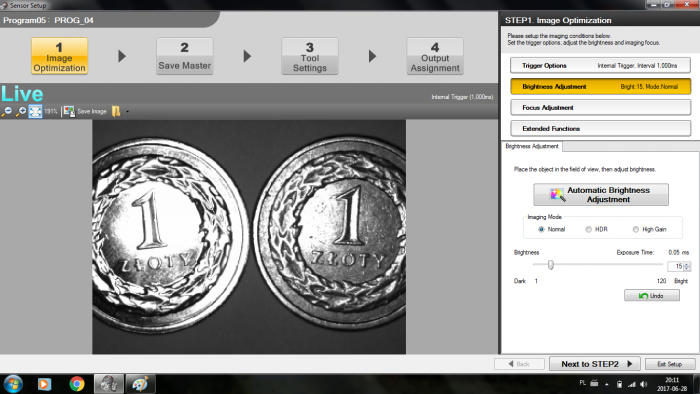
Moneta 1 złoty z 2016 roku:

Moneta 1 złoty z 1994 roku:

Czy widać 12 lat różnicy pomiędzy monetami?
Perforowana końcówka bombilli do picia naparu yerba mate. Niektóre otwory są jednak zapchane.

Widzimy, które:

Fragment łapki na muchy obserwowany w dwóch trybach pobierania światła:


Do widzenia!
