





Podobno ludzie dzielą się na tych, którzy wykonują kopie zapasowe i tych, którzy dopiero zaczną. W pracy automatyka nie możemy pozwolić sobie na utratę aktualnego programu maszyny. Dlatego wykonujemy okresowe kopie. Warto przy tym pamiętać, że robot wchodzący w skład naszego układu, sam jest maszyną i to dosyć skomplikowaną, wykonującą własny program, dlatego przed jakąkolwiek ingerencją warto się zabezpieczyć. W artykule tym chciałem przedstawić rodzaje backupu, procedurę ich wykonania i przywracania oraz zastosowanie każdego z nich na przykładzie robotów FANUC.
Rodzaje kopii zapasowych
W przypadku robotów FANUC można zrobić bardzo wiele różnych kopii zapasowych, ale najczęściej używa się dwóch z nich:
Backup All of above (AOA)
W czasie wykonywania backup-u AOA na, zewnętrzny nośnik kopiowane są wszystkie pliki znajdujące się w pamięci robota. Zaletą tego rodzaju backupu jest dostęp do każdego pliku z osobna, co daje nam możliwość przywrócenia jednego pliku, jeśli istnieje taka konieczność.
Podczas tworzenia backup-u AOA tworzona jest kopia następujących plików:
- Domyślne pliki logiczne (*.DT) -pliki zapasowe tworzone w ramach ustawień domyślnych.
- Plik systemowy (*.SV) -plik przechowujący ustawienia systemowe.
- Plik danych konfiguracyjnych wejść/wyjść (*.IO) -przechowuje ustawienia we/wy.
- Plik danych (*.VR) -przechowuje dane rejestrów.
- Plik programu (*.TP)
IMAGE BACKUP
Kopia pamięci typu IMAGE to nic innego jak zrzut pamięci robota podzielony na 1MB „porcje”. Kompiowana jest pamięć FROM i SRAM, DRAM nie jest kopiowany. Dostępne wielkości pamięci to 32/64/128MB FROM (dodatkowo 256MB w przypadku kontrolera R-30iB Plus) i 2/3MB SRAM. Dodatkowo, wielkość backupu typu Image jest mniejsza niż suma FROM i SRAM, bo kilka ostatnich MB FROM nie jest kopiowane (pamięć podręczna, wielkość zależna od kontrolera).
Zaletą IMAGE BACKUP jest fakt, że zapisujemy cały system razem z wszystkimi ustawieniami. Nie mamy za to możliwości wgrania pojedynczego pliku programu do pamięci (przeciwnie do AOA).
Tabela poniżej przedstawia zasadnicze różnice między typami kopii zapasowych:
| Backup AOA | IMAGE Backup | |
| Dostęp do plików | Dostęp do każdego pliku z osobna | Brak dostępu do pojedynczych plików |
| Zapisywanie/wczytywanie | Można wczytać każdy plik z osobna | Nie można wczytać pojedynczego pliku |
| Rozmiar | Niewielki (kilkaset kB do kilku MB) | Znacznie większy (w zależności od pamięci FROM/SRAM robota) |
| Wersja oprogramowania, opcje softwarowe | Informacje o systemie i softwarze w plikach backdate.dt i orderfil.dat | Nie można wyciągnąć pojedynczych danych o systemie |
| ROBOGUIDE | Można wczytać w ROBOGUIDE | Brak możliwości wczytania w ROBOGUIDE |
Wykonanie Backupu AOA
Do archiwizacji możemy stosować: pamięć USB (od modelu RJ3iC), kartę Compact Flash, komputer z portem RS-232 i oprogramowaniem KFLOPPY (nieużywane od wersji RJ3iC). Na potrzeby prezentacji użyjemy pamięci USB. Backupy, jeśli na USB, zaleca się robić na USB w kontrolerze (urządzenie UD1:), a nie w Teach Pendancie (UT1:).
- Wkładamy nośnik do gniazda USB znajdującego się w TeachPendancie Robota.

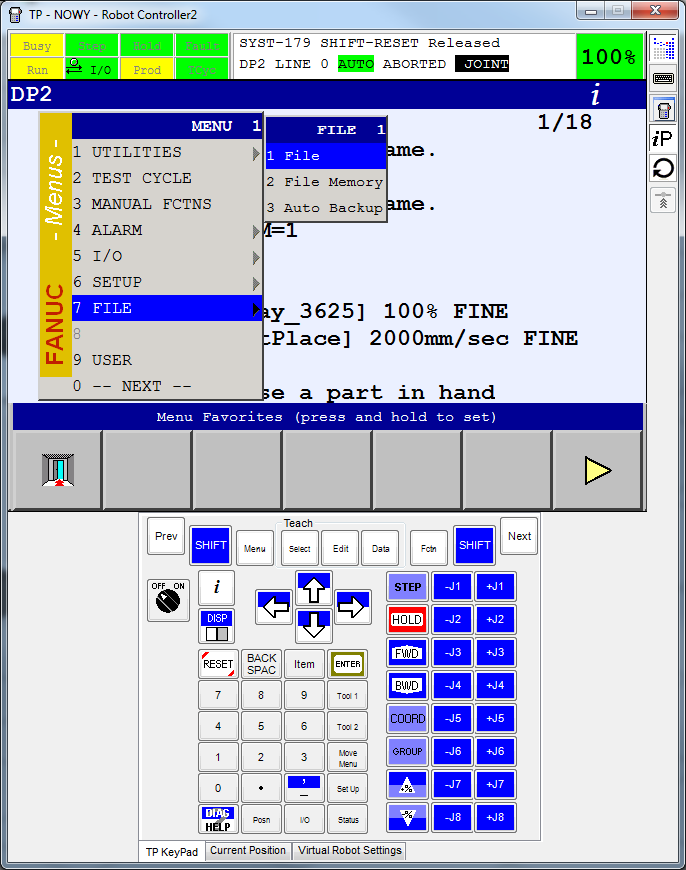
- Na TeachPendancie wybieramy klawisz MENU, a następnie przechodzimy do pozycji FILE>File.
- Na ekranie pojawi się widok menu przeglądania plików.

- Wybieramy F5 [UTIL]>Set Device>USB Disk.
- Wybieramy F5 [UTIL]>FORMAT. (jeśli nie chcemy formatować dysku USB pomijamy ten krok). Nie zaleca się formatowania nośników USB z poziomu kontrolera robota, lepiej wykonać format z poziomu komputera.
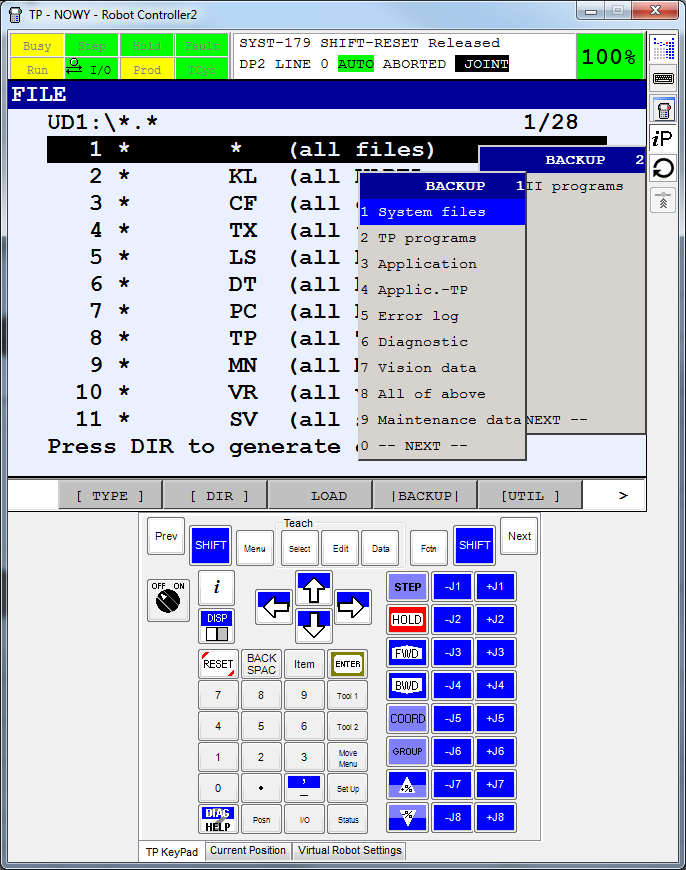
- Wciskamy F4 [BACKUP] i wybieramy opcję All of Above. Potwierdzamy wciskając ENTER.
- Czekamy na zakończenie backup-u. W ostatniej linijce mamy podgląd na postęp procesu.

- Po zakończeniu backup-u wyciągamy nośnik danych z gniazda.
Wykonanie backupu IMAGE
Istnieją dwie metody wykonania IMAGE backup. Na robotach z kontrolerem R-30iA/R30iB i nowszych mamy do dyspozycji obie metody. Na kontrolerach starszych dostępny jest wyłącznie drugi wariant.
IMAGE backup wariant 1
- Wkładamy nośnik do gniazda USB znajdującego się w TeachPendancie Robota.
- Przełącznik ON/OFF TeachPendanta ustawiamy w pozycji ON.

- Na TeachPendancie wybieramy klawisz MENU, następnie przechodzimy do pozycji FILE>File.
- Wciskamy F4 [BACKUP] i wybieramy opcję Image backup.
- Potwierdzamy wciskając ENTER.
- Po zatwierdzeniu pojawia się okno z zapytaniem o lokalizację kopii pamięci. Folder, do którego chcemy zapisać backup musi być wcześniej stworzony.
- W kontrolerach z kabinami Mate lub Open Air wyłączamy i włączamy zasilanie (w kontrolerach z kabinami A lub B reset zasilania następuje samoczynnie).
IMAGE backup wariant 2
Wariant drugi rozpoczynamy z wyłączonym kontrolerem robota.
- Wkładamy nośnik do gniazda USB znajdującego się w TeachPendancie Robota (w starszych wersjach wkładamy kartę do slotu znajdującego się na panelu kontrolera).
- Podczas uruchamiania kontrolera przytrzymujemy przyciski F1+ F5 – pojawi się menu wyboru, w którym wybieramy ” Controller backup/restore „.
- Z kolejnego menu wybieramy „Backup Controller as Images„
- Wybieramy z listy nośnik na którym ma być wykonany backup
- Postępujemy według instrukcji na ekranie (mogą się różnić w zależności od wersji).
Podczas wykonywania kopii na ekranie wyświetlane będą nazwy kopiowanych plików (z rozszerzeniem *.IMG)
NIE WYŁĄCZAMY KONTROLERA ZANIM WSZYSTKIE PLIKI NIE ZOSTANĄ SKOPIOWANE! Po wykonaniu kopii, ekran kontrolera powinien wyświetlać ekran na którym zaczynaliśmy (BOOT MONITOR).
Podsumowanie
Tym sposobem mamy wykonane dwie kopie zapasowe pamięci naszego robota. W kolejnej części pokażę jak wczytać wcześniej wykonane kopie i jak wgrywać pojedyncze pliki z backupu AOA. Przepraszam za częściowy brak ilustracji, ale większość pokazałem na przykładzie programu ROBOGUIDE, (bo nikt nie pozwolił na przestój maszyny 😉 ), a niestety w symulacji nie można wykonać IMAGE Backup.
 |
{kind=link}