





Pomimo dynamicznego rozwoju komunikacji przemysłowej, dalej najczęściej spotykana jest komunikacja szeregowa. Jest to najprawdopodobniej spowodowane kwestiami ekonomicznymi oraz tym, że jest przez inżynierów już dobrze poznana. Mówiąc o komunikacji szeregowej nie mam na myśli komputerowego złącza USB, a raczej interfejs RS232 oraz RS485. W tym artykule spróbuję wyjaśnić czytelnikom czym są wspomniane interfejsy oraz pokażę jak fizycznie i programowo połączyć falownik ASTRADA DRV-21 ze sterownikiem Horner.
Wstęp teoretyczny
Ze względu na to, że obraz jest więcej wart niż tysiąc słów, to pozwolę sobie wstawić filmiki, które świetnie zobrazują czym są dane interfejsy oraz czym się różnią. Dla większości czytelników filmiki tego autora mogą być dobrze znane, ponieważ były już dosyć często udostępniane w ramach konkursu. Co ciekawe sam poznałem ten kanał właśnie w ten sposób.
RS232
RS485
Komunikacja falownika DRV-21 ze sterownikiem Horner
Do demonstracji komunikacji posłużyłem się sterownikiem Horner XL4e. Sterownik XL4e programuje się w środowisku Cscape, o którym już wspominałem w moim wcześniejszym artykule.
Podłączenie sterownika z falownikiem
W naszym wypadku zamiast komputera podłączymy sterownik. Do komunikacji wykorzystamy ekranowaną skrętkę.
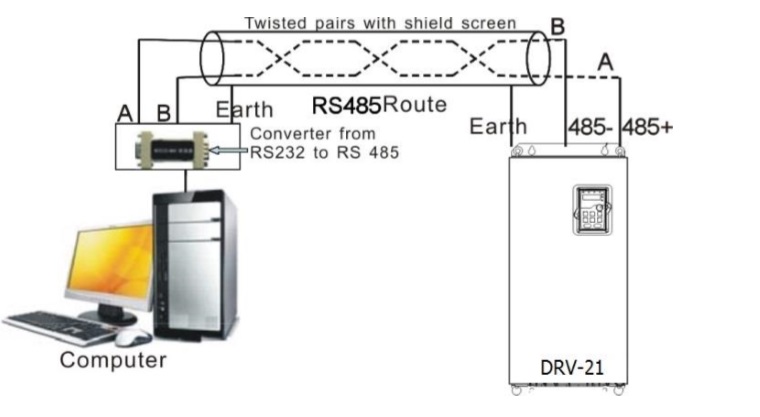
W przypadku sterownika nie mamy do czynienia ze zwykłą listwą przyłączeniową, a z gniazdem RJ45, które mylnie może być postrzegane jako złącze Ethernet. W przypadku tego sterownika złącze Ethernet jest w srebrnej osłonie, natomiast złącze szeregowe w czarnej.

W obudowie jednego złącza znajdują się dwa porty szeregowe. Czytając dokumentację widzimy, że RS485 znajduje się na porcie 2. Do wejścia „A” w falowniku podłączamy PIN 1, a do B podpinamy PIN 2, do prawidłowego działania wymagany jest również wspólny przewód masowy „GROUND”, który podłączamy do PINU 6.
Bardzo ważne jest to abyśmy nie pomylili się zaprasowując złączkę RJ45, ponieważ łatwo może dojść do pomyłki.
Parametryzacja po stronie falownika DRV-21
W pierwszej kolejności musimy zajrzeć do dokumentacji falownika aby wybrać źródło poleceń na falowniku jako Modbus RTU, ponieważ do komunikacji wykorzystuje się Modbus’a.

W tym celu po wejściu do parametru P00.01 ustawiamy „2”, w ten sposób ustawiliśmy źródło poleceń sterujących na port komunikacyjny.
W następnej kolejności powinniśmy ustawić takie parametry jak:
- adres urządzenia,
- prędkość komunikacji,
- format danych.
W pierwszej kolejności powinniśmy nadać, lub sprawdzić adres urządzenia naszego slave’a, który znajdziemy pod parametrem P14.00.
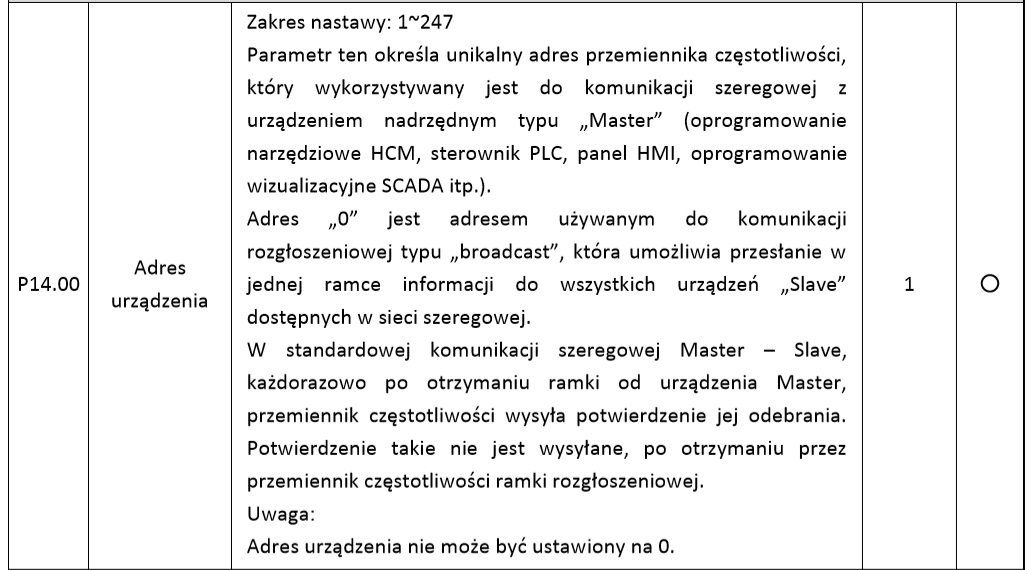
Ustawiony adres powinniśmy zapamiętać, ponieważ będzie nam potrzebny przy dalszej konfiguracji połączenia. W przypadku komunikacji szeregowej bardzo ważne jest to aby te parametry były takie same na obu urządzeniach (Master oraz Slave), w przeciwnym razie komunikacja będzie niemożliwa.
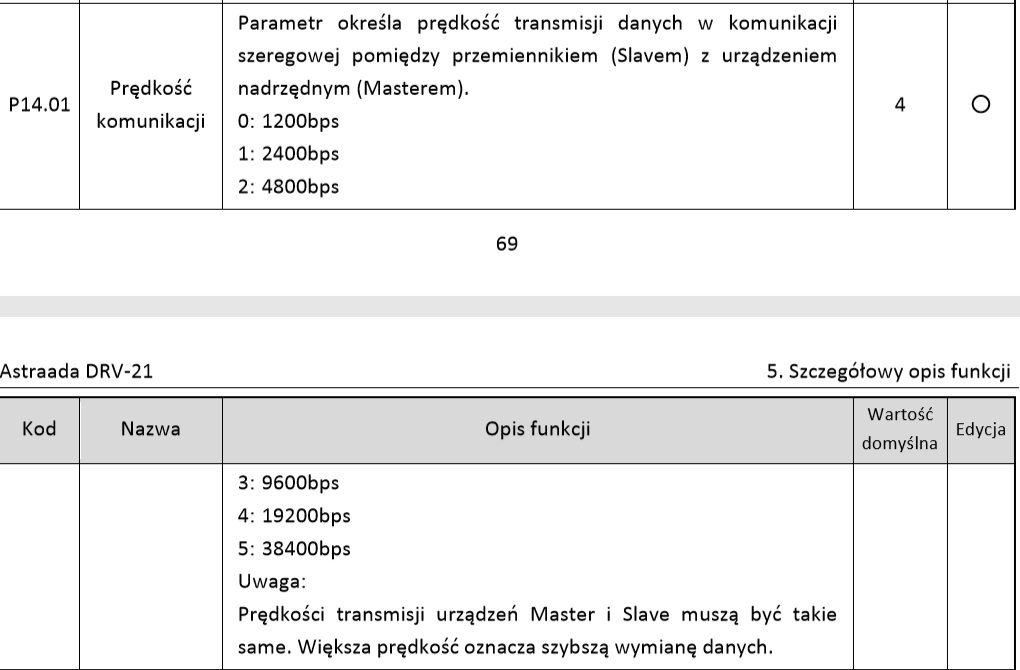
W naszym przypadku w parametrze P14.01 ustawiamy „4” co określa prędkość 19200bps.
Następnie określamy format danych.

Wybieramy na falowniku parametr P14.02 i ustawiamy format danych na „1”.
Konfiguracja w oprogramowaniu Cscape
W pierwszej kolejności przechodzimy w kolejności: Controller => Hardware Configuration => Serial Configuration

Na tym etapie powinniśmy określić z którego portu będziemy korzystać. Ze względu na to, że komunikacja RS485 znajduje się na porcie drugim, to określamy je jako Modbus Master.
W następnej kolejności musimy określić format danych oraz prędkość przesyłu danych, w tym celu przechodzimy do zakładki Network i ustawiamy je zgodnie z parametrami ustawionymi na falowniku.

Warto zapisać rejestr statusowy ponieważ ułatwia on diagnostykę w przypadku problemów z komunikacją, ale jest to temat na tyle obszerny, że poświęcę mu osobny artykuł w przyszłości.
W dalszej kolejności dodajemy nasze urządzenie w zakładce Device zgodne z adresem naszego urządzenia. W ramach jednej sieci mogą pracować aż 32 urządzenia, dlatego tak istotne jest wybranie prawidłowego adresu.

Wybieramy opcję Modicon PLC 5-Digit ponieważ adresy są 5 cyfrowe w naszym falowniku. Tak samo jak poprzednio warto zarezerwować sobie adres rejestru statusowego i określić pozostałe parametry, w naszym przypadku pozostawiamy je tak jak na zdjęciu powyżej.
Ostatnim etapem jest skonfigurowanie rejestrów, które mają być wymieniane między urządzeniami. W tym celu musimy wrócić do dokumentacji Astrady.

Jak można zauważyć, adresy powinny być zapisane w systemie DEC, a adresy w dokumentacji są zapisane w systemie szesnastkowym, dlatego adresy powinniśmy przekonwertować i dodać offset.
Dla przykładu, przedstawię jak to zrobić, dla przykładu wykorzystamy adres polecenia sterującego.
Wracamy do dokumentacji i sprawdzamy nasz adres.

W systemie szesnastkowym wspomniany adres to 2000H, aby przekonwertować wartość, wykorzystamy darmowe oprogramowanie, które każdy z nas ma na komputerze: „kalkulator” i włączamy tryb programisty wpisujemy adres pamiętając o offsecie.

Mając wspomniany adres dodajemy go do puli adresów, w zakładce Scan List.

Przed adresem 8193 dodajemy „4” która oznacza: „Holding Registers”. W tym polu określamy również rejestr lokalny, do którego wprowadzać będziemy wartości do sterowania oraz określamy, czy parametr możemy tylko odczytać, wpisać, czy to i to. W naszym wypadku wybieramy Polled Read/Write i w następnych kokach zgodnie z parametrami dodajemy resztę rejestrów.
Należy wspomnieć, że przy zadawaniu częstotliwości należy wyskalować wartość od 0 do 5000 (50 Hz).
W ten sposób mamy ukończoną całą konfigurację połączenia szeregowego. W powyższym artykule przedstawiłem jedną z dwóch metod ustanowienia komunikacji , drugą możliwą metodą byłoby wykorzystanie elementów drabinki w tym celu, ale jest o wiele bardziej problematyczna i zajmuje więcej czasu. Metoda którą przedstawiłem jest o wiele prostsza i szybsza.
Podsumowanie
Jeżeli będzie zainteresowanie tematem sterowników Horner, to w kolejnym artykule przedstawię jak do naszej komunikacji dodać wizualizację oraz jak programowo można to obsłużyć. Powyższy artykuł miał tylko za zadanie przedstawić w jaki sposób przeprowadzić konfigurację komunikacji szeregowej oraz jak przykładowo połączyć je. W kolejnych artykułach postaram się przedstawić więcej informacji dotyczących komunikacji szeregowych.
 Artykuł został nagrodzony w Konkursie iAutomatyka w edycji Grudzień 2018 Artykuł został nagrodzony w Konkursie iAutomatyka w edycji Grudzień 2018 Nagrodę Przetwornik pomiarowy JUMPFLEX® dostarcza firma WAGO.Więcej o konkursie: https://iautomatyka.pl/konkurs-iautomatyka/ |