





Artykuł z serii: Relacje ze szkoleń inżynierskich
Byliśmy na kolejnym szkoleniu specjalistycznym więc tradycyjnie dzielimy się naszą opinią. Zapraszamy na relację ze szkolenia Programowania robotów przemysłowych kuka w EMT-SYSTEMS.
Kolorystyczny „brat” KUKA
Luty 2018, temperatura na minusie choć pogoda bardzo ładna. Przyjechaliśmy do Gliwic dzień wcześniej pociągiem z Białegostoku a zainstalowaliśmy się w hotelu Mikulskim o rzut beretem od Centrum Szkoleniowego EMT-SYSTEMS. Od dawna przymierzaliśmy się do poszerzenia swojej wiedzy z robotyki przemysłowej a wybór padł na roboty KUKA nie bez powodu. Do EMT SYSTEMS mogliśmy przyjechać na szkolenie z robotów FANUC ale Marcin już był na tym szkoleniu więc kolejne opcje to roboty ABB lub KUKA. Wybraliśmy więc szkolenie z robotów KUKA ponieważ kolorystycznie pasuje do barw naszego portalu, jest pomarańczowy :). Robota na którym pracowaliśmy nazwaliśmy nawet naszym bratem, kolorystycznym bratem.
Z każdego naszego szkolenia staramy się nagrać kilka ujęć. Wyniku powstaje krótkie video, które najbardziej oddaje charakter i atmosferę takiego wydarzenia – film znajdziesz na końcu.
Nazywam się Rafał Kupiński (ten po lewej) i artykuł który czytasz jest napisany z perspektywy osoby, nie mającej dużego doświadczenia ani wiedzy o robotyce. Komentarze Marcia Faszczewskiego (tego po prawej), doświadczonego automatyka (nie robotyka), zaznaczymy na pomarańczowo.

Zaczynamy!
DZIEŃ I
Zjawiliśmy się z całym naszym osprzętem z samego rana, 30 minut przed rozpoczęciem szkolenia. Zaskoczyło nas to, że kilku uczestników tego szkolenia było już przed nami, pewnie tak jak my nie mogli się doczekać :). Po szybkim zapoznaniu się z obecnymi uczestnikami obraliśmy kierunek do kawiarni, która znajduje się w środku centrum. Kawusia, herbatka soki, napoje, ciacho kruche, miękkie? Co chcesz, i to w cenie szkolenia.
-

- Kawusia to podstawa

-

- Smacznego!

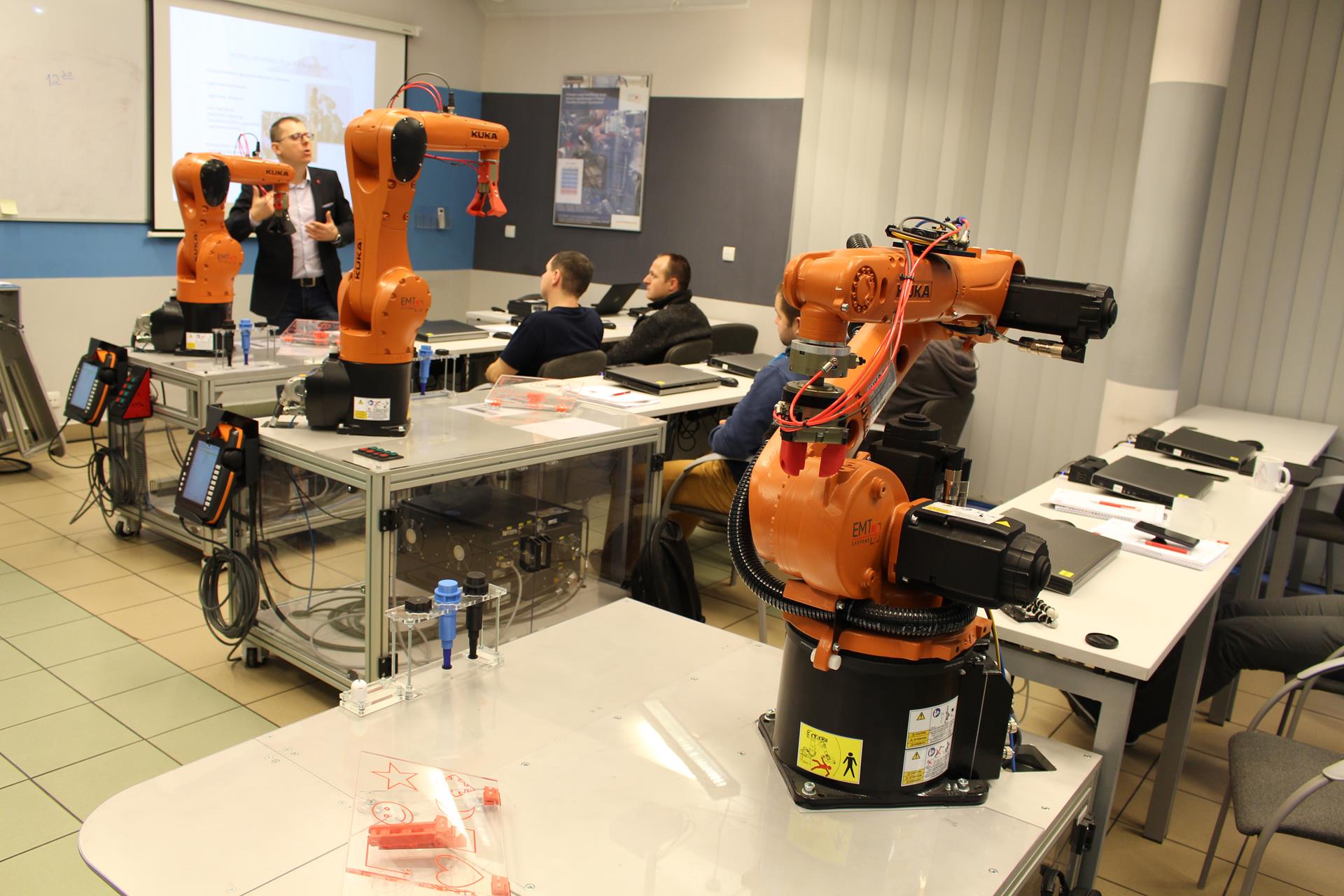
Przed rozpoczęciem szkolenia naszą uwagę przykuł ogromny skórzany fotel na korytarzu. Od razu było widać że ma funkcję masażu, jednak nie zdążyliśmy go teraz przetestować ponieważ wybiła 9:00 – zaczynamy! Zostaliśmy zaproszeni do sali szkoleniowej, na której czekały na nas 3 roboty KUKA. Uczestników było sześciu, więc nie mieliśmy problemu z podziałem grupy. Na każdy robot przysługiwały dwie osoby.
Szkolenie rozpoczęło się przywitaniem uczestników przez sympatyczną i atrakcyjną pracownicę firmy EMT-SYSTEMS, Panią Paulinę oraz przedstawienie prowadzącego. Marek bo tak mu na imię został przedstawiony jako fachowiec z dziedziny robotyki z ogromnym doświadczeniem.
Marcin: Potwierdzam! Byłem wcześniej u Marka na szkoleniu z robotów FANUC i mieliśmy okazję porozmawiać. Pan Marek prowadzi firmę Robotics Solutions i ma na koncie wiele ambitnych projektów związanych z robotyką. Wiedziałem, że trafiliśmy w dobre ręce!
Byłem ciekawy w jaki sposób i czy efektywnie przekaże nam wiedzę. Prowadzący przed rozpoczęciem zajęć spytał się uczestników czy ktoś oczekuje konkretnego zadania pod swój charakter pracy lub ma jakiegokolwiek obiekcje co chce wynieść ze szkolenia. Od nas z grupy nikt się nie zgłosił, ale jestem pewny, że gdyby pojawiła się taka osoba, Marek dopasowałby zadania do potrzeb danego uczestnika. Po tym pytaniu zrozumiałem, że prowadzący jest tu aby nam pomóc, a nie po prostu odbębnić swoją robotę. Zapowiadało się bardzo ciekawie.
Część teoretyczna szkolenia czyli obwody bezpieczeństwa, tryby pracy robota i podstawy robotyki
Jak zawsze bywa na szkoleniach wprowadzenia są najnudniejsze i ciągnące się w nieskończoność – po prostu czysta teoria, a każdy z nas czeka na to co tygryski lubią najbardziej czyli na praktykę :). W tym przypadku teoria była jasna i minęła mówiąc kolokwialnie „jak z kija strzelił”. Zasługa w tym prowadzącego, widać było w nim pełny profesjonalizm i doświadczenie przy programowaniu robotów przemysłowych co pozwoliło pomiędzy teorią wcisnąć kilka ciekawych przykładów z życia.
Marcin: Powiem szczerze. W porównaniu do poprzedniego szkolenia z robotów FANUC (2 lata wcześniej) widać było znaczącą poprawę w prezentacji zagadnień technicznych. Pan Marek prowadził szkolenie bez absorbowania naszego wysiłku. Przekazywał wiedzę jasno i zrozumiale a to ogromy plus! 



Zapoznaliśmy się z obwodami bezpieczeństwa, z trybami pracy robota, z budową szafy sterowniczej, z budową panelu operatorskiego (teach pendant), z systemem zarządzania robotem i systemem czasu rzeczywistego WiwixWorks i wiele innych. Dowiedzieliśmy się kilka ciekawych różnic pomiędzy robotami przemysłowymi największych producentów. Jednak na mnie i na innych uczestnikach furorę zrobiła mysz sześciowymiarowa 6D w teach pendant’cie. Pewnie myślisz sobie, że co? Mysz 6D? Nie, to nie jest błąd. Moja reakcja była identyczna jak Twoja czytelniku. Mysz 6-cio wymiarowa znajduje się z prawej strony panelu operatorskiego, jej czułość i możliwość ustawienia sobie robota w pozycji jaką sobie zażyczymy bez najmniejszego problemu pozwala stwierdzić, że jest to strzał w „10-tkę” producenta robotów KUKA.
Marcin: Również byłem pod wrażeniem! Wcześniej miałem do czynienia ze sterowaniem robota za pomocą przycisków plus i minus. Z myszką 6D jest to zupełnie inny poziom komfortu pracy. Co prawda pierwsze 30 minut wymaga przyzwyczajenia i trochę wyobraźni ale zaraz po tym czujesz się jak doświadczony programista robotów. Nasz brat KUKA po prostu nas słuchał. Wyobraź sobie, że trzymasz w ręku piłeczkę naprzeciw siebie. Jak przesuwasz piłeczkę do przodu – to robot wykonuje identyczny ruch jak twoja ręka. Jak przesuniesz piłeczkę po skosie w dół, robot nadąża za tym ruchem. Tak samo działa mysz 6D w KUKA. To nie wszystko! Wyobraź sobie teraz, że taką piłeczkę przesuwasz do przodu i jednocześnie ją przekręcasz – TAK! Robot też wykona ruch i przekręcenie ramienia. Cudo!

Zostało omówić podstawowe funkcje dostępne na panelu operatorskim takie jak wejścia/wyjścia cyfrowe, praca na plikach, konfiguracja, diagnostyka, pierwsze uruchomienie, układy współrzędnych, przejścia do trybów pracy, pomoc. Czułem już te lekkie podekscytowanie, że lada chwila przechodzimy do ćwiczeń praktycznych, kiedy to Marek powiedział:
„PRZERWA.” Na co my odpowiedzieliśmy: Lecimy testować fotel!

Marcin: był Rafał i nie ma Rafała 🙂
Na obiad mieliśmy 30 minutową przerwę, jadłodajnia znajdowała się na zewnątrz w innym budynku do którego zaprowadziła nas Paulina (tak ta sama, która nas przywitała z samego rana!). Po pysznym obiedzie, wszyscy stawiliśmy się na sali, by zapoznać się bezpośrednio z naszym pomarańczowym „bratem”.
Część praktyczna – m.in. układy współrzędne robota
No i się zaczęło, pierwsze zadanie dla każdego z uczestników – kalibracja czyli tak zwany Mastering Robota. Najpierw prowadzący za pomocą sprzętu do kalibracji firmy KUKA pokazał nam jak to się robi, a następnie po kolei każdy z Nas rozkalibrował i ponownie skalibrował każdą oś robota.
Nie zdążyliśmy usiąść dosłownie na 10 minut, aby zapoznać się z kolejnymi zadaniami, a już musieliśmy przystąpić do wyznaczania TCP czyli tool centrum point oraz wyznaczyć układ współrzędnych narzędzia metodą ABC World oraz układ współrzędnych BAZA-BASE metodą 3 punktową. Każdy z uczestników musiał wykonać zadanie samodzielnie. Jeśli nie miałeś do czynienia z robotami przemysłowymi to zapewne zadania brzmią dość skomplikowanie, ale spokojnie, prowadzący rozłożył wszystko na części pierwsze i każdy nawet laik zakończył zadanie pomyślnie.





Na koniec pierwszego dnia ustawiliśmy jeszcze pozycję home. Kolejny dzień będzie jeszcze bardziej fascynujący, zaczynamy go od programowania.
DZIEŃ II
Programowanie robota przemysłowego KUKA
Drugi dzień zaczęliśmy od… krótkiej teorii, aby omówić 3 podstawowe instrukcje. Zajęło nam to 15 minut i już każdy stał przy swoim robocie trzymając panel w ręku, aby przetestować każdą z instrukcji. Pierwszą z nich była instrukcja PTP (point to point) – po dodaniu dwóch punktów do naszego programu robot porusza się z punktu do punktu. Następna instrukcja LIN – czyli kolejny raz wyznaczamy 2 punkty za pomocą tej instrukcji i robot porusza się z punktu do punktu, ale w sposób liniowy. Trzecia funkcja to CIRC – jak łatwo wywnioskować z nazwy, robot porusza się po określonym łuku od punktu do punktu. Tyle z teorii, czas zacząć działać!
Marcin: To było najbardziej praktyczne szkolenie na jakim byliśmy do tej pory. Szacuję, że 90% szkolenia wykonywaliśmy ćwiczenia.

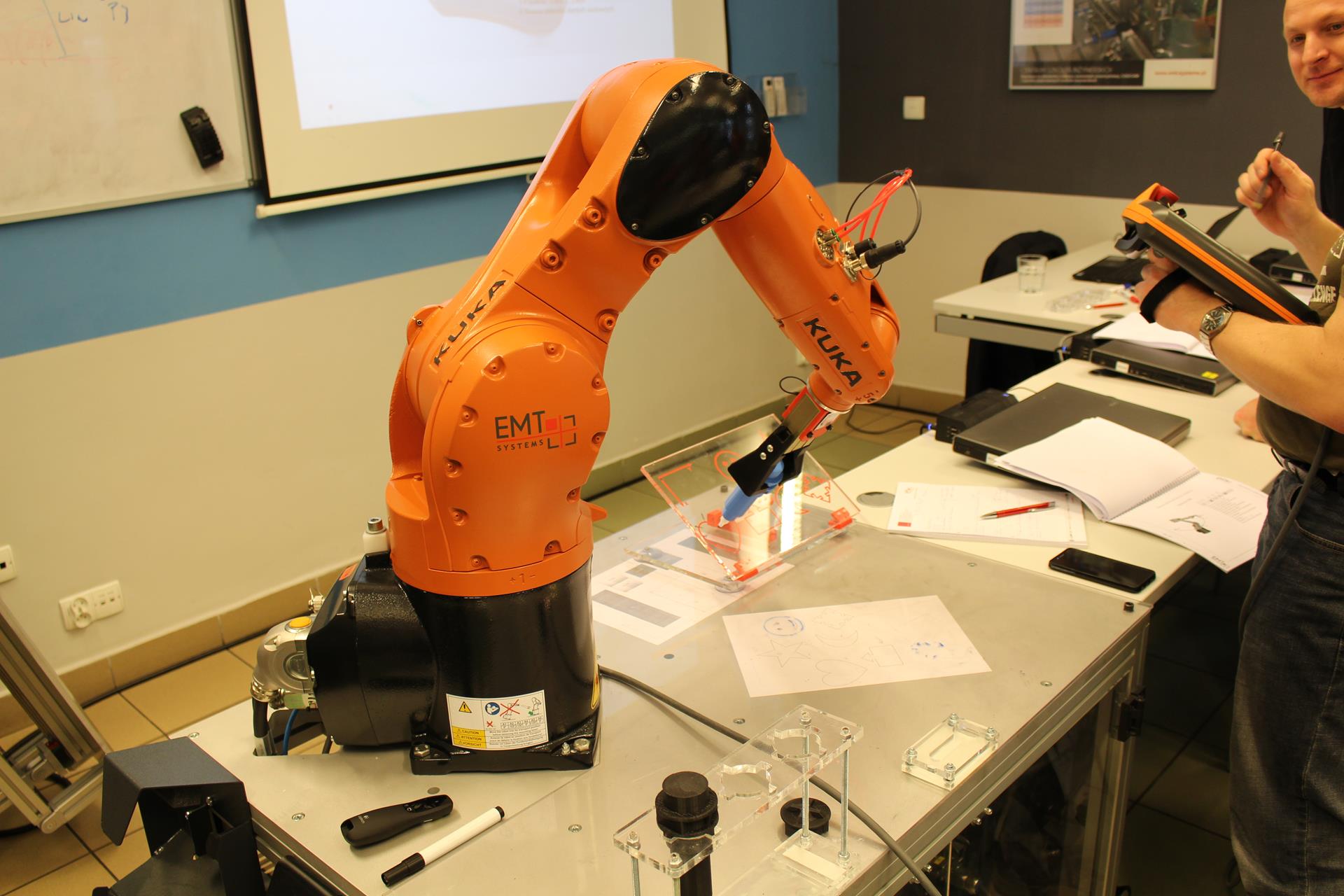
Prowadzący Marek wymyślał nam najróżniejsze zadania, z użyciem jednej, dwóch a nawet trzech funkcji. Najpierw sforsowaliśmy wyjście aby otworzył się chwytak robota i włożyliśmy do niego mazak. Programowaliśmy robota, aby poruszał się po określonej trajektorii, były to wzory na specjalnie przygotowanej płytce (m.in. serce, księżyc, uśmiech). My natomiast nie mogliśmy się oprzeć pokusie i zaczęliśmy programować robota aby wykonał pewien rysunek. Jaki? Dowiesz się z filmu na końcu tego artykułu 😉






Każdy z uczestników musiał wykonać samodzielnie kilka programów według zaleceń prowadzącego. Tak samo jak w pierwszy dzień kiedy zaczynałem się coraz bardziej wkręcać w programowanie i w tym momencie nie były mi w głowie jakiekolwiek przerwy, Marek ogłosił: PRZERWĘ. No dobra.. zgłodnieliśmy to idziemy.
Po 30 minutowych odpoczynku, na którym zjedliśmy obiad w tym samym miejscu co dzień wcześniej wróciliśmy na sale szkoleniową. Obiad był… pyszny! Na prawdę, nie wiem czy to zasługa kucharki, czy po prostu byłem tak głodny, że zjadłbym konia z kopytami:) jednak stawiam na te pierwsze, bo koledzy którzy byli już niejednokrotnie na szkoleniu w EMT-SYSTEMS opowiadali o pysznych obiadach u Pani Krysi? Zosi?
Marcin: Tereski! Pani Teresa jest już sławna! Pisałem o Niej w relacji ze szkolenia programowania sterowników PLC Siemens S7-1200 również w EMT-SYSTEMS.
Po powrocie każdy z nas zaczął od razu „dłubać” przy robotach, aż tu nagle BUUUM, coś pękło… Moja pierwsza myśl, robot… na szczęście się myliłem! Jeden z uczestników przy ustalaniu ruchu robota, aby wziął mazak z podstawki, źle wysterował manipulator i podstawka pod naciskiem robota pękła. Prowadzący jak gdyby nigdy nic wyjął kolejną płytkę i bez mrugnięcia okiem powiedział „proszę się nie przejmować, to normalne”.
A poniżej dumny sprawca tego zamieszania:
W dalszej części szkolenia zrobiliśmy kilka programów, każdy zapisaliśmy pod inną nazwą. Każdy z uczestników musiał zrobić swój program, nikogo nic nie ominęło. Na koniec Marek pokazał nam jak połączyć ze sobą wszystkie podprogramy w jeden główny. W efekcie zobaczyliśmy jak robot zachowuje się po sklejeniu w całość wszystkich sekwencji. Zapoznaliśmy się również z bardziej zaawansowanymi funkcjami logicznymi jak waitfor i syn out. Przy każdej nowej funkcji implementowaliśmy ją do robota, aby ją przetestować.
Marek przekazał nam wiele ciekawostek dotyczącą robotów, o których nie miałem pojęcia. Pokazał nam jakich błędów się wystrzegać i w jaki sposób obsługiwać robota i nim sterować zgodnie ze sztuką programowania. Powiem krótko: drugi dzień był bardzo owocny!
FILM ZE SZKOLENIA
Po złożeniu wszystkich programów w jedną całość każdy powinien mieć ten sam, albo bardzo podobny program. Jednak nie my. Jak pisałem wcześniej, my musieliśmy wykonać coś extra! Domyślasz się co narysowaliśmy? Sprawdź w filmie:
PODSUMOWANIE
Moim zdaniem szkolenie jest warte uwagi jeśli jesteś początkującym robotykiem, zamierzasz pracować z robotami KUKA lub po prostu pojawiły się tego typu roboty w Twoim zakładzie pracy. Szkolenie było przeprowadzone w przemyślany i profesjonalny sposób. W dużej mierze zawdzięczamy to prowadzącemu Markowi, który idealnie dopasował się do uczestników, wszystko tłumaczył w sposób prosty i zrozumiały. Zawdzięczamy to między innymi jego ogromnemu doświadczeniu w branży robotów przemysłowych. Ze szkolenia wyniosłem przede wszystkim mocne podstawy o robotach przemysłowych i miałem okazje własnoręcznie nimi sterować i poznać ich specyfikacje oraz podstawowe możliwości. Wielkim plusem tego szkolenie, jest fakt, ze każdy z nas (uczestników) własnoręcznie zaprogramował kilkukrotnie robota i wykonał wszystkie ćwiczenia. Często bywa przy części praktycznej tego typu szkoleń, że wykonuje się jedno ćwiczenie dla jednego stanowiska, nawet jeśli szkoli się przy nim 2-3 osoby. Tutaj było inaczej. W ten sposób przeprowadzone szkolenie czyli minimum teorii, reszta praktyka jest idealnym rozwiązaniem aby w ciągu dwóch dni przyswoić jak największą ilość informacji. Jak to mówi stare przysłowie: „praktyka czyni mistrza”. Myślę, że jeszcze w przyszłości wybiorę się na szkolenie do EMT-SYSTEMS i mam nadzieje, że każde szkolenie w ich ofercie jest tak wartościowe jak te, w którym uczestniczyłem. Cześć!
Przegląd szkoleń EMT-SYSTEMS możesz sprawdzić na ich stronie http://emt-systems.pl/
