




Dzień dobry! W poprzednim poście napisaliśmy dwa programy dla inspekcji wizyjnej wybranego układu kształtów na szkolnej linijce. Tym razem przeprowadzimy test poprawności wydrukowanego wzoru na kostkach gitarowych:

Zapraszam również do pozostałych części naszego poradnika:
Część 0. Stanowisko wizyjne Keyence
Część 1. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
Część 2. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
Część 3. Krótki tutorial kamery wizyjnej Keyence IV-Navigator
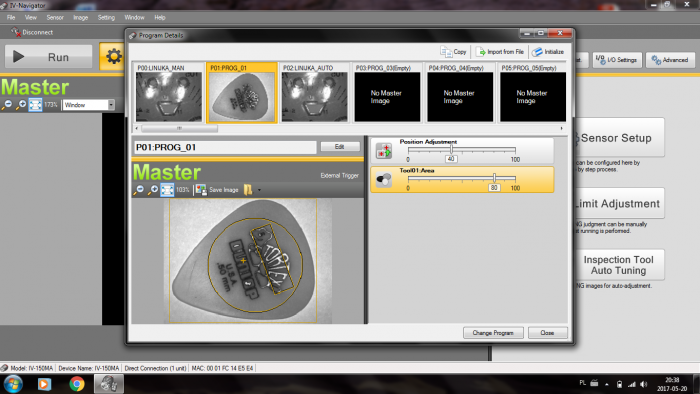
Cały proces przebiega analogicznie do poprzedniej inspekcji. Nie będę więc omawiał szczegółów. Przejdźmy zatem do głównego ekranu i wybierzmy program P01.

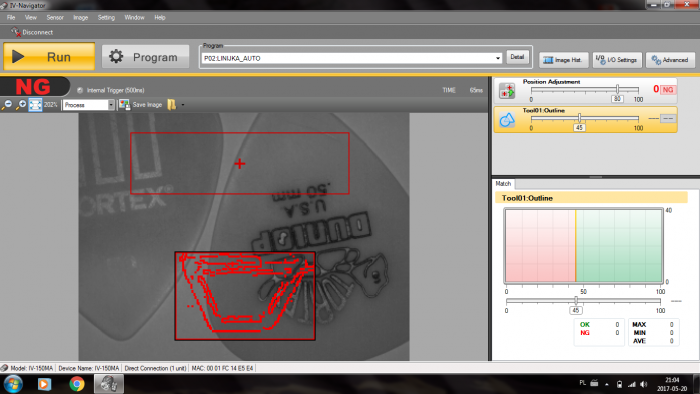
Tak wygląda nasza kostka w trybie Run:

Ustawienie parametrów jasności i ostrości uwydatnia szczegóły obrazu. Widzimy wyraźnie czarny nadruk. Kostka nie jest fabrycznie nowa, stąd biały poblask. Nie przeszkodzi nam to jednak w dalszym programowaniu.


Po zapisaniu zdjęcia referencyjnego wybieramy metody inspekcji. Na początku skonfigurujmy opcję Position Adjustment. Kostkę będziemy wykrywać na podstawie pikseli krawędzi. Kostka ma kolor ciemnoczerwony, co dobrze kontrastuje na białym tle. Możemy wymazać wykryte piksele na środku.

Przejdźmy do testów w trybie Live i wybierzmy próg:


Nowe narzędzie – Area
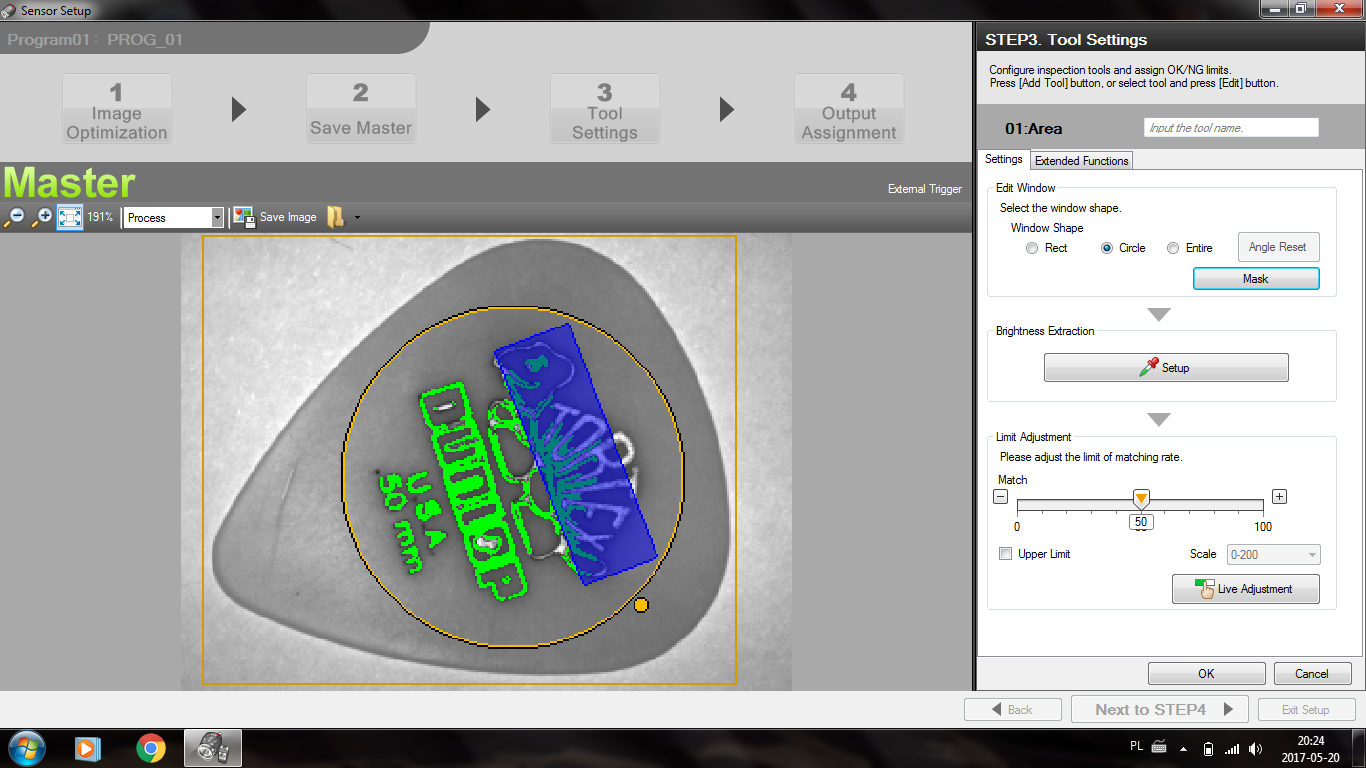
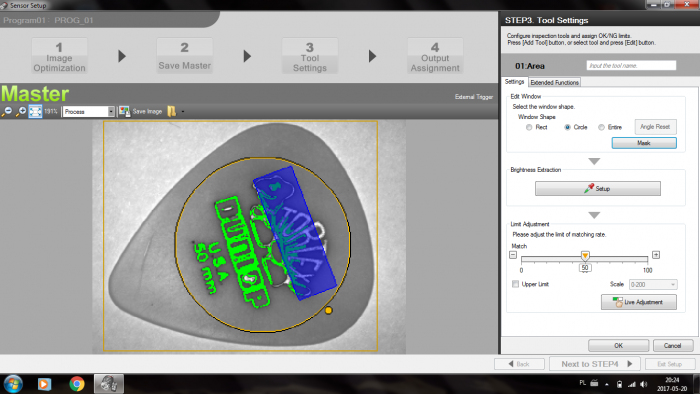
Jeśli masz wprawne oko zauważysz, że próg załączenia sprawdzałem na obu kostkach. Przejdźmy teraz do konfiguracji narzędzia właściwego inspekcji. W poprzednim przykładzie skorzystaliśmy z Outline. Tym razem więc skorzystamy z Area. Jest to narzędzia zliczania pikseli o wybranym przez nas kolorze wraz z zakresem tolerancji. Operujemy na kamerze czarno-białej, będziemy więc korzystać z monochromatycznej gamy kolorów.

Konfiguracja wszystkich narzędzi w oprogramowaniu IV-Navigator jest bardzo podobna. Wybierzmy interesujące nas odcienie czerni, klikamy więc w przycisk Brightness Extraction.

Dwa pomarańczowe wskaźniki na suwaku określają nasze „widełki”. Nowe kostki posiadają nadruk w kolorze czarnym, więc zakres ustawiamy na odcienie bliskie koloru czarnego.


Nie potrzebujemy ciemnych pikseli w obrębie „skorupy” żółwia. Mogą one wystąpić również w kostce używanej. Możemy wykreślić je z inspekcji narzędziem Mask.

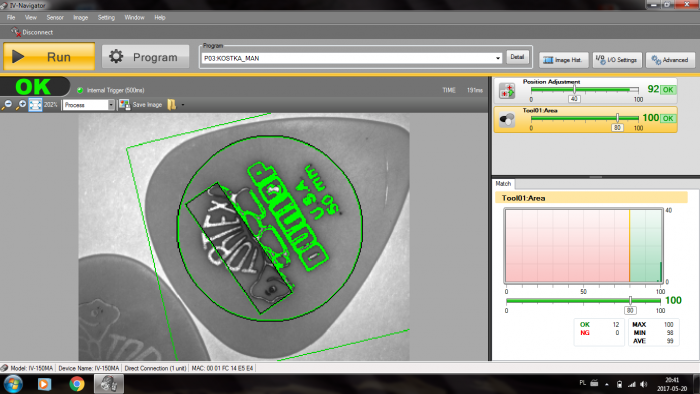
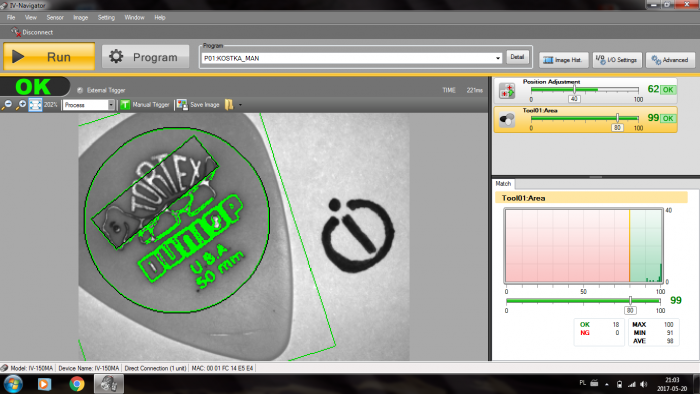
Testujemy naszą inspekcję w trybie „na żywo”.

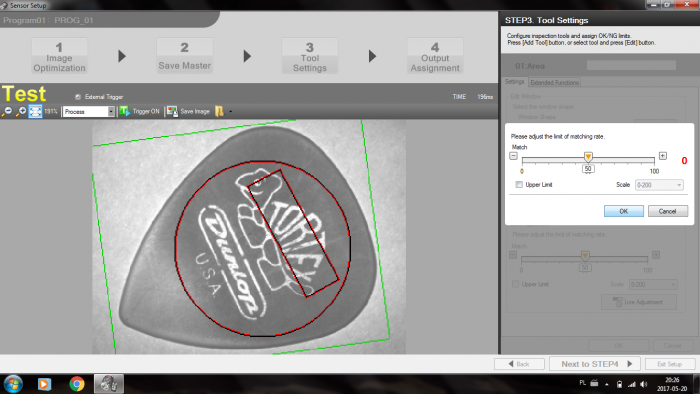
Na kostce używanej kamera nie wykrywa ani jednego czarnego piksela. Program spełnia więc swoje zadanie. Przetestujmy program w kilku innych sytuacjach, by lepiej dobrać zakres:



Naszą inspekcję wizyjną możemy uznać za wstępnie ukończoną, przejdźmy do kolejnego kroku i zapiszmy nasz nowy program.

Sprawdźmy działanie programu i przełączanie wariantu w trybie Run:
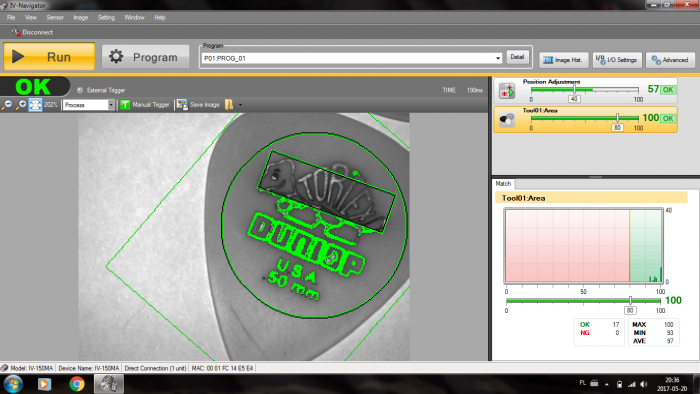

Przełączanie wariantów działa prawidłowo. Potrzebujemy jeszcze zaprogramować tryb automatyczny dla inspekcji kostki. W tym celu przechodzimy do przeglądarki listy programów i zmieniamy nazwę obecnego programu na KOSTKA_MAN. Następnie kopiujemy program do pustego slotu P03:
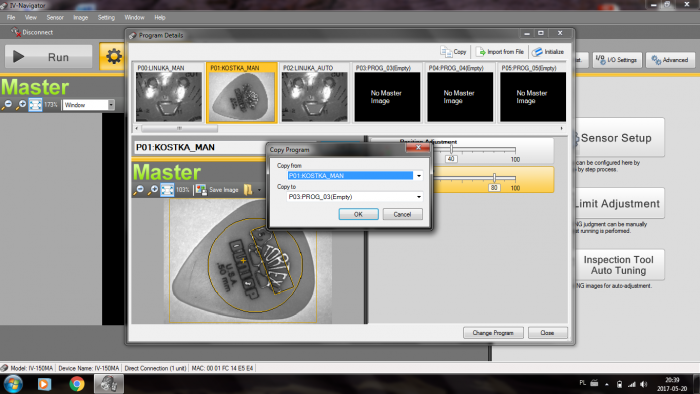
W nowym programie zmieniamy wyzwalanie zewnętrzne na wewnętrzne co 500ms.

Zrobione!
Możemy następnie przetestować cały mechanizm inspekcji ze wszystkimi wariantami w trybie ręcznym i automatycznym. Co prawda zapomniałem zmienić nazwę P03 na KOSTKA_AUTO, ale mniejsza już z tym.




Działa prawidłowo? Możecie wyrazić swoje opinie w komentarzach. Tak oto zakończyliśmy zabawę z wariantami i trybami oraz drugą część poradnika podstaw obsługi oprogramowania Keyence IV-Navigator. W ostatniej części spróbuję przedstawić funkcje logiczne narzędzi inspekcyjnych, a także kilka osobliwych, być może ciekawych sytuacji mogących wystąpić pod kamerką.
Do zobaczenia
